Motores elétricos são o “coração” de qualquer fábrica ou indústria, mas falhas nesses equipamentos podem causar sérios problemas. Responsáveis por acionar linhas de montagem, impulsionar correias transportadoras e dar mobilidade a juntas robóticas, os motores estão sujeitos a falhas que podem gerar prejuízos.
Falhas em motores elétricos são uma realidade em praticamente todos os ambientes industriais. Esses equipamentos têm se tornado cada vez mais complexos e técnicos, o que torna ainda mais desafiador mantê-los operando com desempenho máximo e evitar falhas.
Se você trabalha em uma indústria, certamente já viu de perto ou ouviu falar sobre falhas em motores elétricos. É fundamental estar ciente que problemas mecânicos ou elétricos podem levar a falhas, causando paradas na linha de produção e acarretando prejuízos significativos à empresa.
Acabe com as paradas não planejadas. Conheça os sensores Tractian!
As questões que levam a falhas em motores elétricos e seus componentes podem ser de diversas naturezas. No entanto, a maioria delas pode ser evitada com equipes bem treinadas e a adoção de programas de manutenção eficazes, como sistemas de monitoramento de condição capazes de prever eventuais problemas.
Conhecer as principais causas de tais falhas é fundamental, pois isso pode significar a diferença entre os custos pelo tempo de inatividade do ativo e seu melhor uso. Para ajudar você a ficar por dentro do tema, a Tractian lista abaixo os 10 tipos de falhas mais comuns em motores elétricos e o que fazer para evitá-las.

1. Desalinhamento
Problemas com alinhamento de eixos estão entre os mais comuns enfrentados pelos profissionais de manutenção. Estudo apresentado na International Maintenance Conference IMC-2012 aponta que mais da metade das paradas de máquinas nas indústrias brasileiras estão relacionadas a desalinhamento de eixos.
O problema ocorre quando o eixo de acionamento do motor (rotor) ou a peça de acoplamento não estão corretamente alinhados com a carga, resultando na transferência de esforços mecânicos que aumentam o desgaste do motor e sua carga mecânica aparente. Um dos efeitos deste problema é o aumento da vibração, tanto na carga quanto no motor em si.
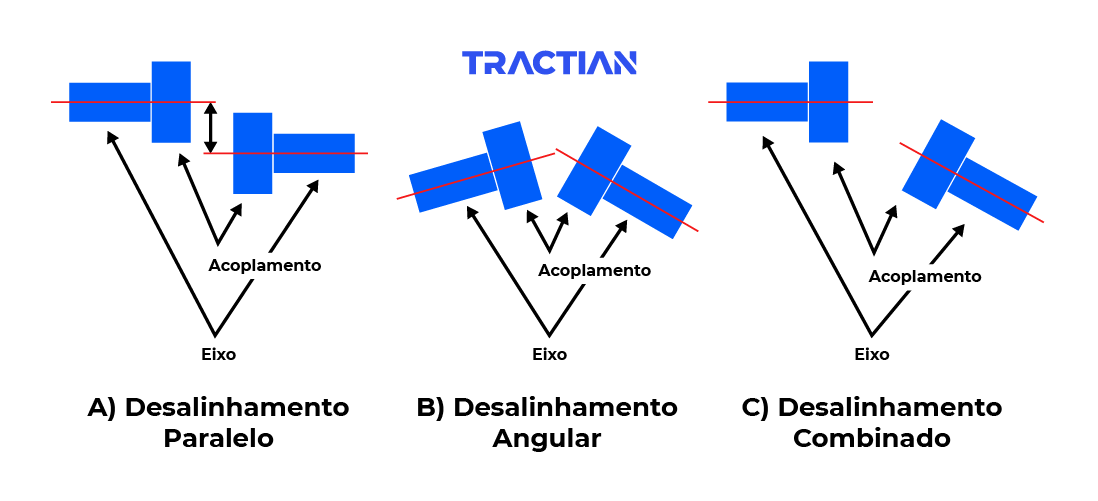
O desalinhamento pode ser classificado em três tipos: paralelo, angular ou combinado. O desalinhamento paralelo ou radial ocorre, como o próprio nome já diz, quando as linhas de centro se apresentam de forma paralela.
Já o desalinhamento angular ou axial é observado a partir de um ângulo formado entre as linhas centrais do eixo, que se cruzam. O desalinhamento combinado, por sua vez, traz tanto desvios paralelos quanto angulares nas linhas do centro, e é considerado o tipo mais comum entre os três.
Maquinários supervisionados por IA: Fale com um especialista Tractian!
Além do desgaste prematuro nos componentes de transmissão, o desalinhamento ainda pode acarretar em problemas como a diminuição na capacidade de produção, diminuição da vida útil do ativo, redução da eficiência da máquina e aumento da energia utilizada por ela.
Para evitar esse tipo de problema, é recomendável o monitoramento de características como temperatura e vibração do ativo. Sistemas de manutenção preditiva têm a capacidade de coletar dados sobre o funcionamento de um ativo, registrá-los e analisá-los, conseguindo, assim, prever quando determinadas falhas podem vir a acontecer, incluindo o desalinhamento.
A plataforma da Tractian conta com algoritmos que atuam com a detecção de anomalias no comportamento do ativo. Os sensores instalados nas máquinas captam os sinais vibratórios, analisa-os e emite alertas que facilitam a identificação de qualquer ocorrência fora do normal.
2. Overload/Sobrecarga
Acontece quando um motor é exigido além do seu torque nominal, ou seja, a corrente elétrica de operação fica acima do normal, o que causa um superaquecimento. Isso faz com que a vida útil do motor diminua, e, dependendo do nível de sobrecarga, o dispositivo de proteção do motor pode ser acionado, o que causará uma parada inesperada na operação do ativo.
Quando um motor está sobrecarregado, é possível observar alguns sinais, como o consumo excessivo de corrente elétrica e torque insuficiente. O calor excessivo provocado pelo superaquecimento é uma das principais causas de falha, e o principal prejuízo é o desgaste prematuro do motor e de seus componentes mecânicos, que podem levar à falha permanente.
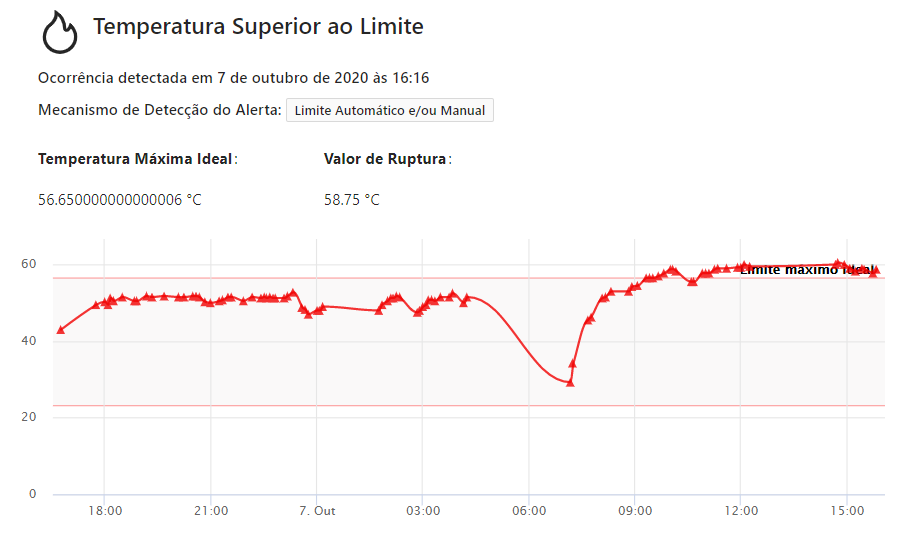
Uma das alternativas para evitar esse problema é o monitoramento constante da temperatura do ativo. Esse processo pode ser feito através de inspeções em linhas de transmissão, infravermelho e sensores de temperatura. Entre essas opções, o sensor Tractian é capaz de identificar aumentos excessivos da temperatura, trazendo um diagnóstico do painel elétrico e assegurando a manutenção preditiva do ativo.
3. Pé suave
Acontece quando a fixação dos pés do motor ou do seu componente acionado não estão assentados sobre a mesma superfície, o que pode desencadear tensões mecânicas de desalinhamento tanto nos eixos do motor quanto da carga.
Essa falha de assentamento geralmente traz outro problema à tona: uma vez que os pés de um motor não se encontram equilibrados, uma ação como apertar os parafusos de fixação de cada pé pode acabar criando novas tensões mecânicas de desalinhamento.
Uma das formas de detectar o problema é através da observação dos parafusos de fixação: quando ocorre o pé suave, dois parafusos geralmente ficam em posição diagonal. Uma analogia simples para visualizar essa ocorrência é pensar em uma cadeira ou mesa desiguais: elas sempre balançam em uma determinada posição diagonal.
Para evitar que isso aconteça, é importante que motor e carga estejam afixados de forma que o assentamento não venha a provocar vibrações adicionais no ativo, tampouco uma eventual transferência de esforços para o motor.
Assim como falamos anteriormente, o uso de sensores de vibração também pode ajudar na prevenção desse tipo de problema, uma vez que essa tecnologia é capaz de medir os índices de vibração de um ativo.
Ao adquirir o sistema de monitoramento online da Tractian, a plataforma baseada em inteligência artificial gera o chamado DNA de Vibração do Equipamento. Trata-se da primeira notificação do ativo, gerada aproximadamente 15 dias após a instalação dos sensores, que coletam dados como velocidade RMS, harmônicos de vibração e aceleração média. A partir daí, temos um diagnóstico do comportamento padrão do ativo:

4. Desgastes do rolamento
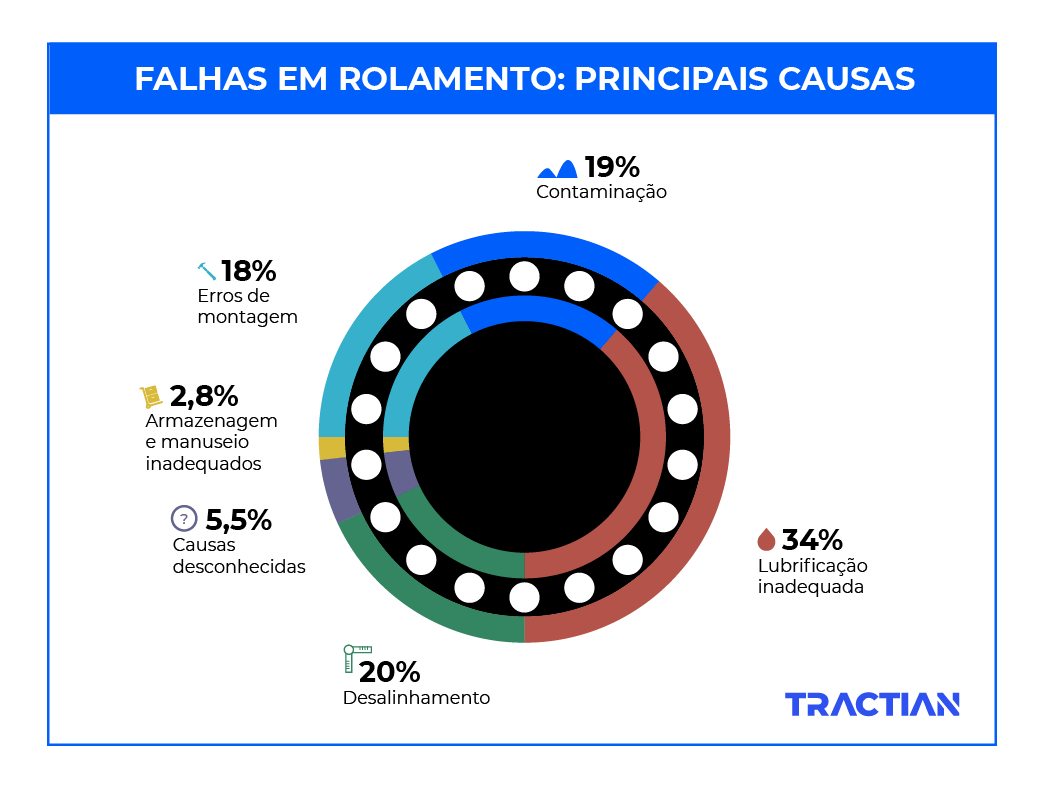
Estima-se que grande parte das falhas em motores sejam causadas por desgastes do rolamento. As falhas do rolamento podem acontecer por diversos motivos, entre eles carga mais pesada que o projetado, lubrificação inadequada, vedação do rolamento ineficaz, tensões induzidas no eixo, desalinhamento, contaminações, entre outros.
Previna falhas de máquinas. Agende uma demonstração grátis!
Em linhas gerais, podemos classificar as falhas de rolamento em pré-operacionais e operacionais. Tudo o que é pré-operacional diz respeito a danos que podem acontecer antes ou durante a instalação do rolamento, como por exemplo: desalinhamento estático, ajuste impreciso do eixo e caixa de mancal, assentos de rolamentos nos eixos e nas caixas de mancal defeituosos, manuseio, armazenagem, tensão excessiva por passagem de corrente elétrica no rolamento e transporte, etc.
Já as falhas operacionais compreendem basicamente lubrificação ou vedação ineficientes, falso brinelamento, fadiga do material, fuga de corrente (devido à passagem de corrente elétrica pelo rolamento) e desalinhamento operacional.
As falhas de rolamento geralmente criam um efeito cascata, que acelera as falhas nos motores elétricos. Para evitar as paradas não planejadas e os custos inesperados de manutenção, uma das saídas é fazer a análise de vibração do ativo, que permitirá ao time de manutenção determinar as causas iniciais do problema e até evitar que ele volte a se repetir.
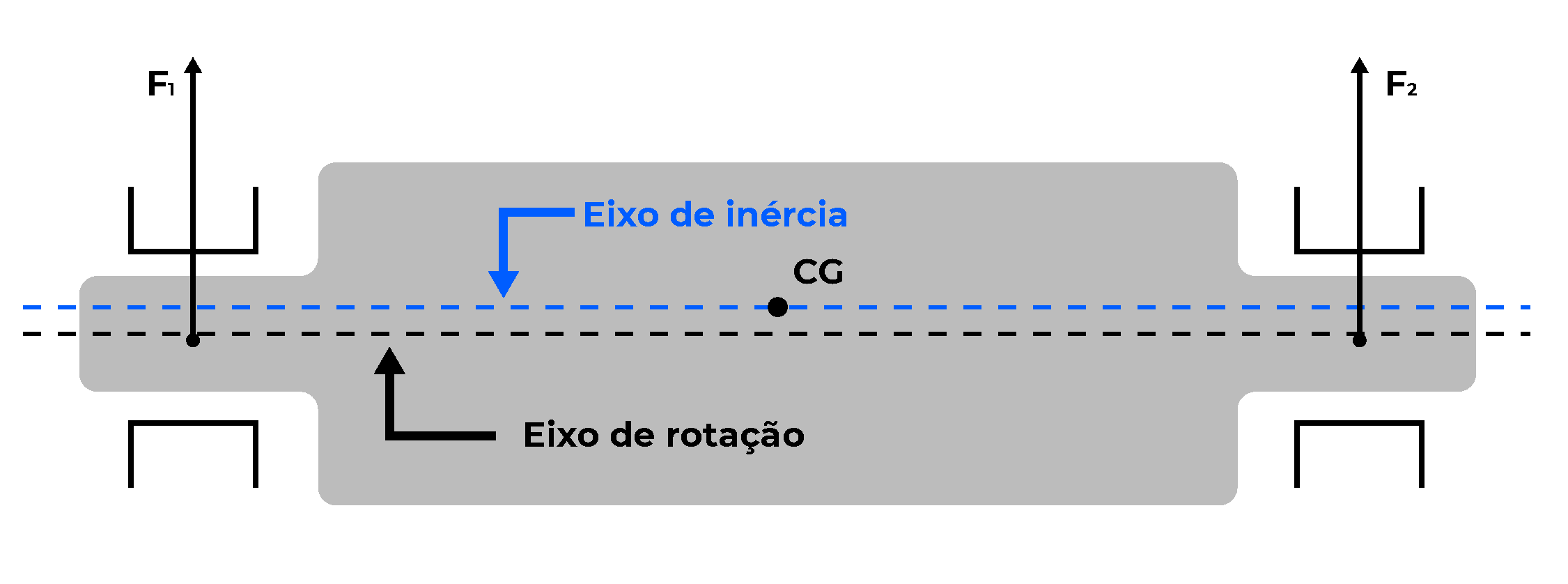
5. Desbalanceamento de eixo
Ocorre quando uma parte giratória do centro de uma massa não gira sobre o eixo de rotação, causando desequilíbrio. Tal distribuição irregular de massa gera forças centrífugas que são transmitidas aos mancais e podem danificar componentes, resultando na diminuição da vida útil do ativo.
O desbalanceamento pode ser causado por inúmeros fatores. Os mais comuns são acúmulo de sujeira, falta de pesos de balanceamento, massa irregular nos enrolamentos do motor ou mesmo variações de fabricação.
Também podemos classificá-lo em três tipos: estático, conjugado ou dinâmico. No desbalanceamento estático, o eixo principal e o eixo ao redor do qual a máquina rotaciona se apresentam de forma paralela, mas não coincidem.
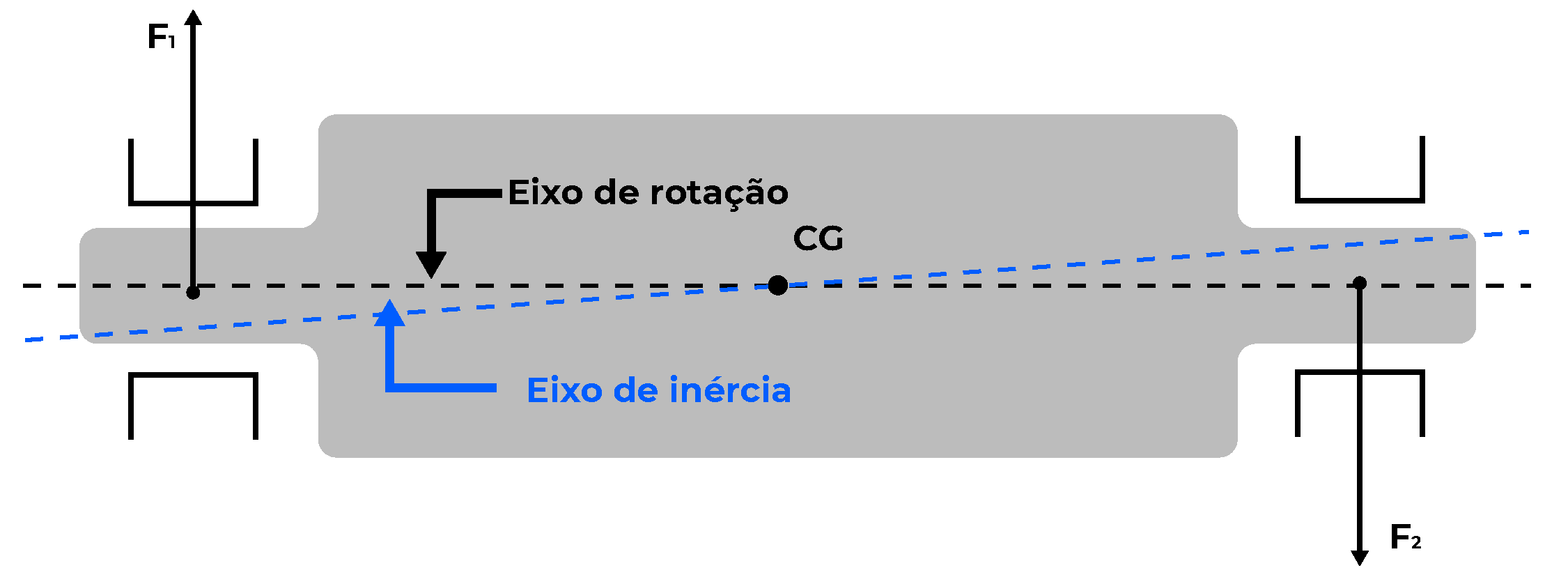
Já no conjugado, os eixos não estão paralelos, mas há uma intersecção entre eles no centro de gravidade do rotor.
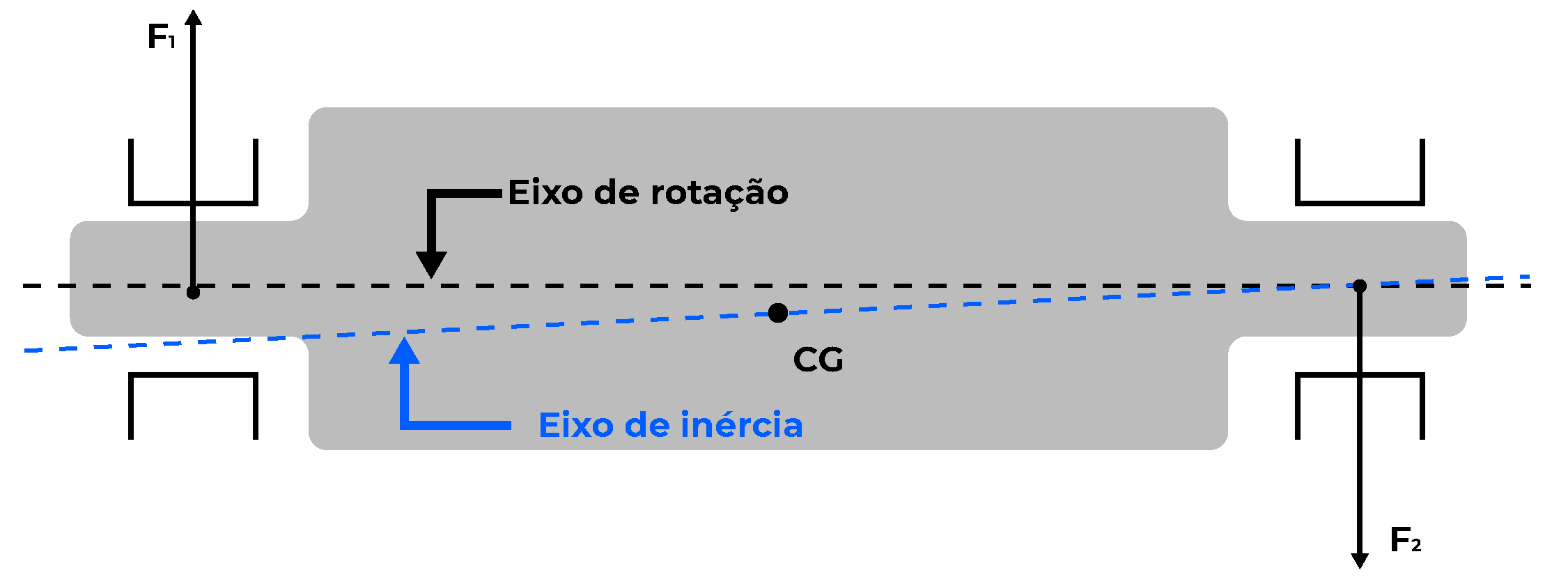
Por fim, o desbalanceamento dinâmico seria uma combinação entre estático e conjugado, onde eixo principal e eixo de rotação não são paralelos e tampouco se intersectam.
O principal prejuízo que o desbalanceamento de eixo causa é o desgaste prematuro em componentes de transmissão mecânica, que consequentemente resulta em falhas prematuras do ativo. A análise espectral de vibração é uma das ferramentas que irão ajudar a determinar se a máquina está em equilíbrio, evitando assim custos adicionais de manutenção.
6. Folga do eixo
Folga ocorre quando há um desgaste excessivo entre as partes de um ativo. Ela pode acontecer no giro, pelo afastamento excessivo entre elementos fixos e de rotação; ou sem giro, em partes que normalmente são estacionárias, como um pé e uma base, por exemplo.
Há ainda uma terceira definição de folga, segundo o Vibration Diagnostic Manual for Technical Associates of Charlotte (Manual de diagnóstico de vibração da Technical Associates of Charlotte), a ser levada em consideração. Vamos analisá-las como tipos A, B e C.
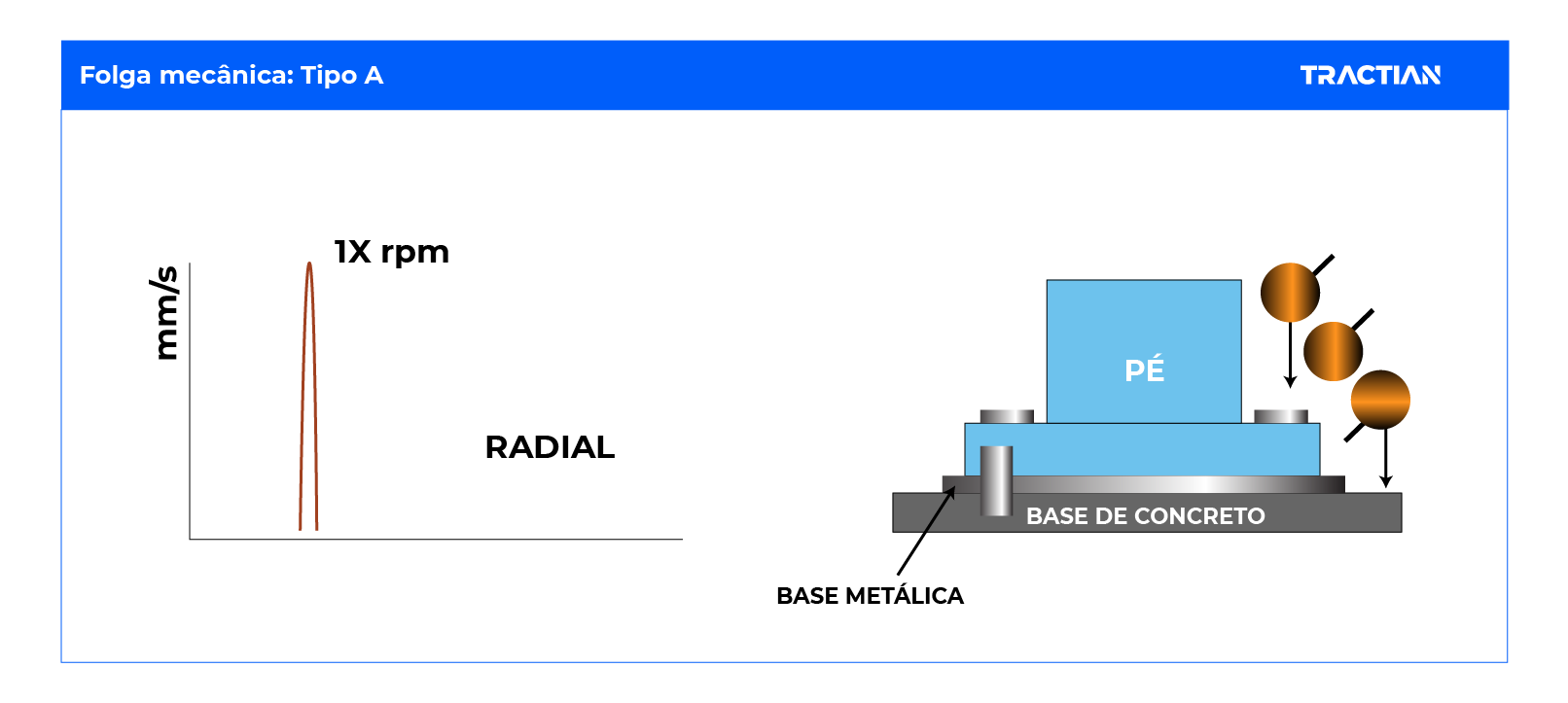
Folga tipo A
A folga tipo A, ou estrutural, é causada por fragilidade nos pés, base ou fundação do ativo, e ocorre geralmente por distorções da armação ou base, deterioração do rejuntamento ou do apoio ao solo e pela folga de parafusos que sustentam a base. Ela se manifesta no espectro através de uma onda de um pulso por rotação:
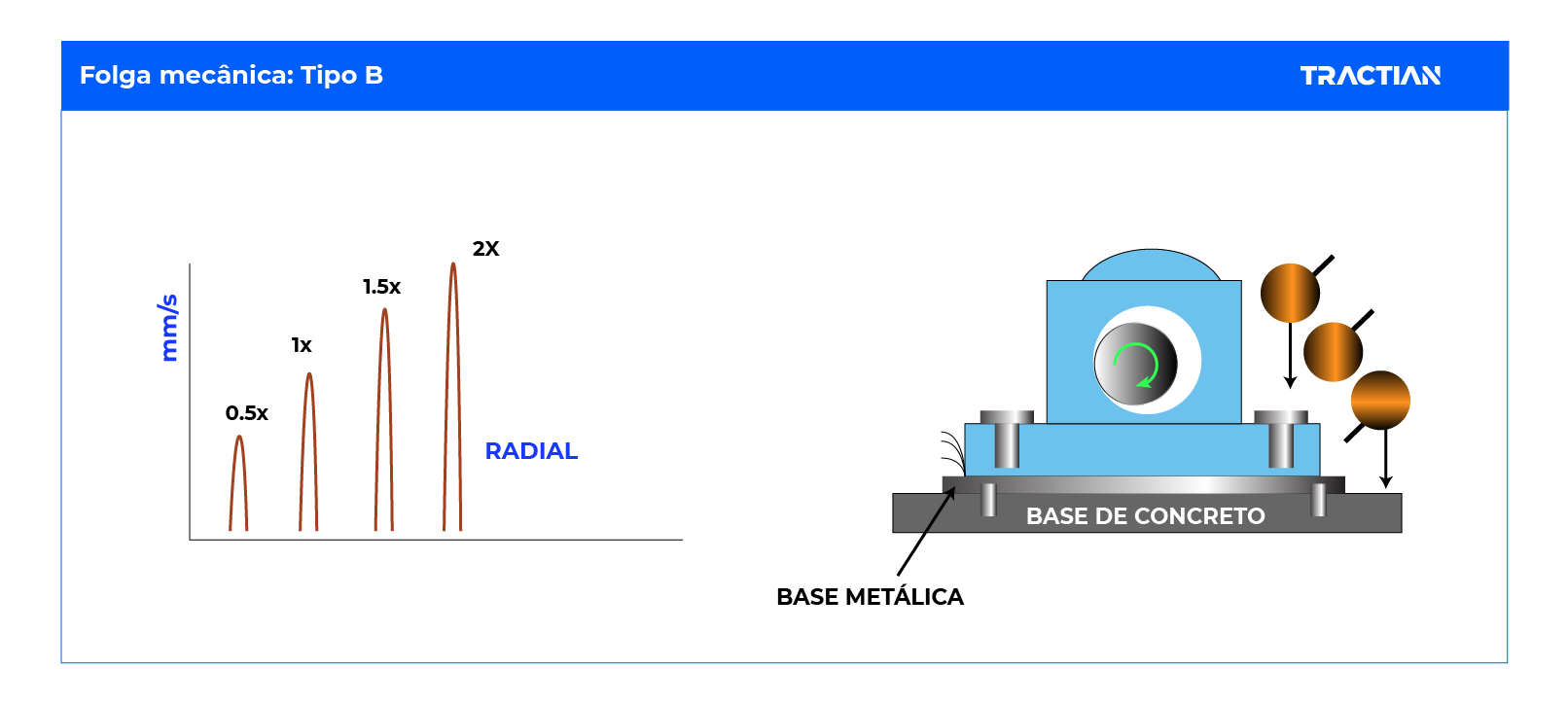
Folga tipo B
A folga tipo B tem como principal característica a presença de parafusos soltos no apoio da base, rachaduras no pedestal do mancal e/ou na estrutura do skid. No espectro, ela aparece como uma onda temporal de dois pulsos por rotação:
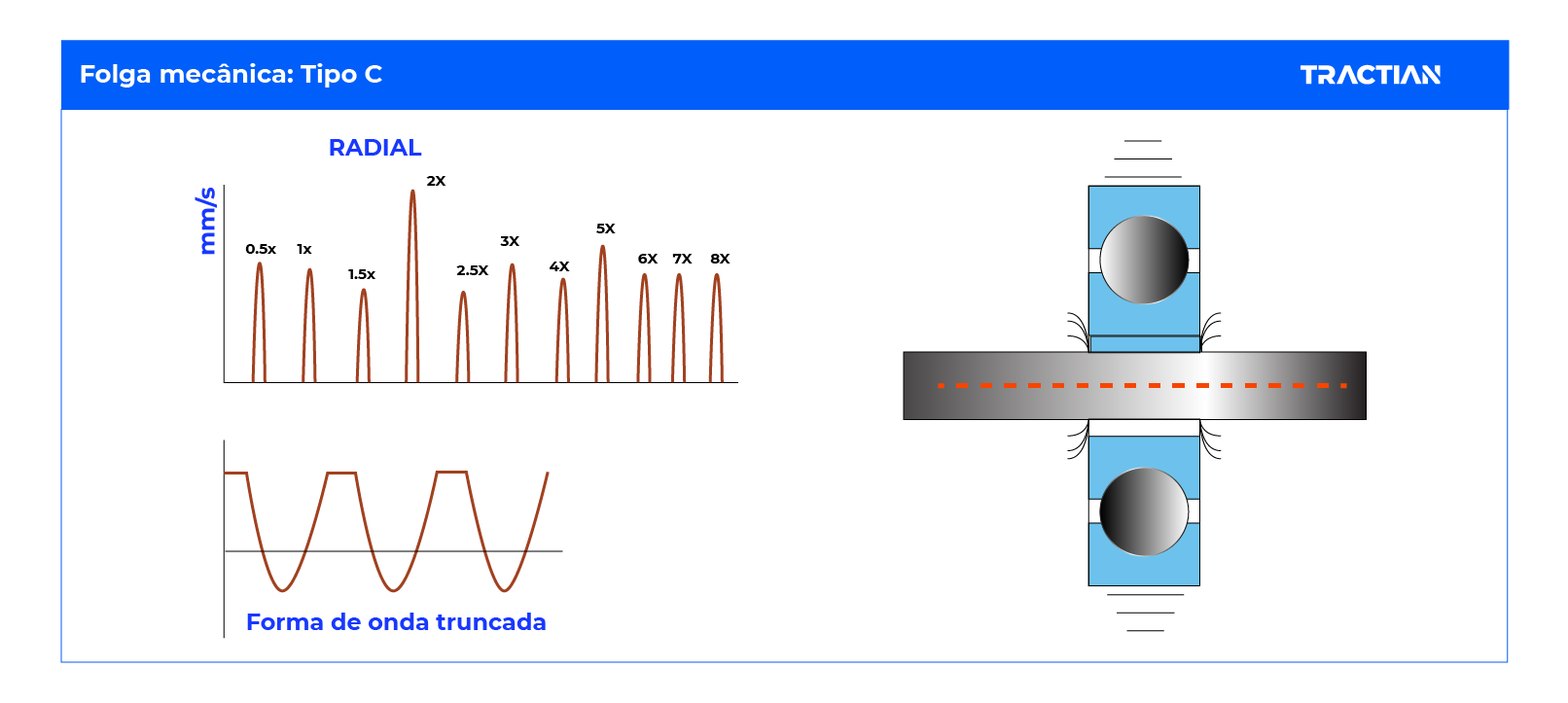
Folga tipo C
Já a folga tipo C ocorre por um ajuste incorreto entre as partes que compõem as forças dinâmicas do rotor, como folga excessiva entre rolamento e luva, um rotor solto em um determinado eixo ou um casquilho solto na tampa, por exemplo. A aparição no espectro apresenta um piso de ruído elevado, detectando a folga, e vários harmônicos, que representam as respostas não lineares das peças soltas.
Diferente das ondas A e B, as revoluções das ondas temporais das folgas tipo C apresentam um padrão não repetitivo.
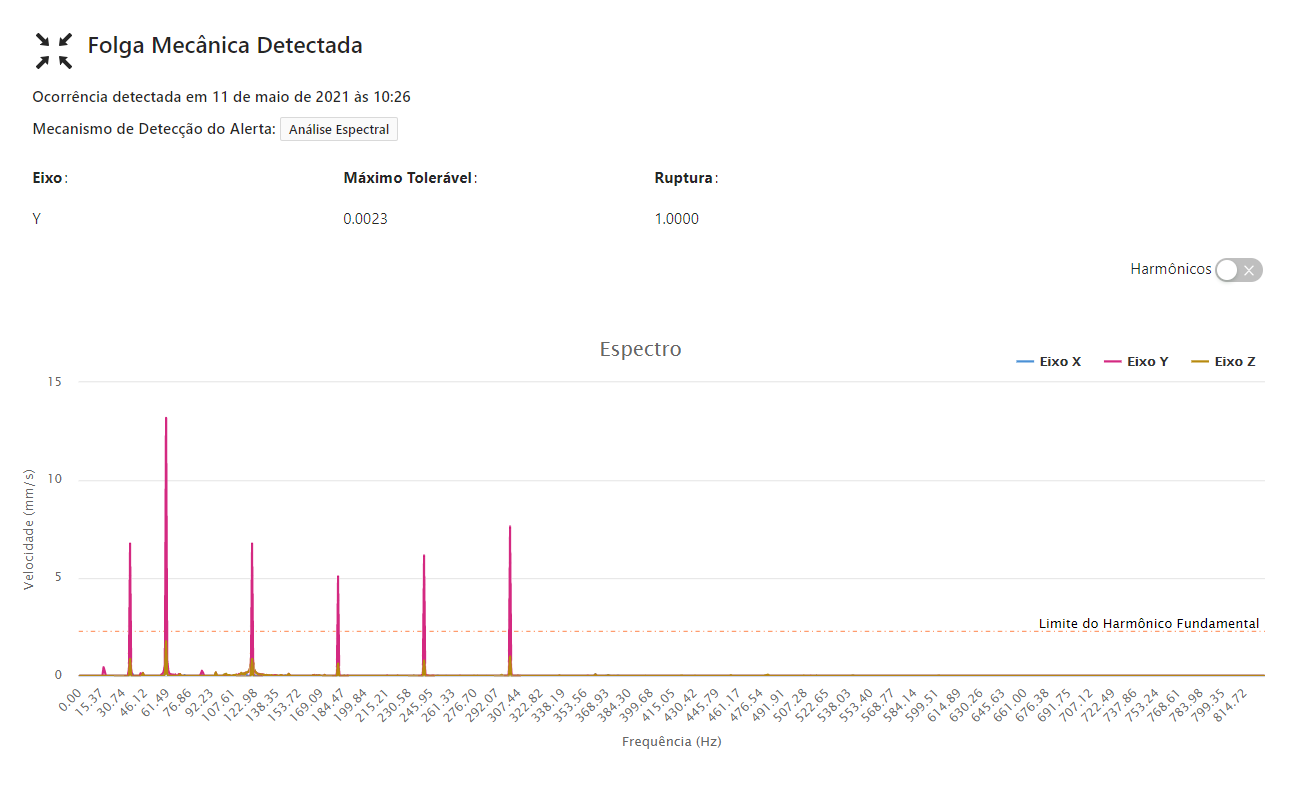
Assim como em demais fontes de vibração, a identificação da folga é imprescindível para que o problema seja resolvido antes que o desgaste dos componentes rotativos resulte em uma falha mecânica. Assim como nos casos de desbalanceamento de eixo, a análise de vibração também é uma alternativa para prever e evitar esse tipo de problema.
Observe abaixo o exemplo de folga mecânica detectado pela plataforma Tractian: nestes casos, o gestor de manutenção é notificado sobre o estado em que o ativo se encontra e, dessa forma, é orientado com antecedência a corrigir o problema de forma assertiva.
7. Transientes de tensão
São os sinais de tensão transitórios que ocorrem quando um circuito ou carga é acionado, também conhecidos como “surtos” ou “picos de tensão” no chão de fábrica. Trata-se de um problema de qualidade de energia comum no dia a dia das indústrias.
Como estão associados a grandes picos de interferência eletromagnética, podem causar danos aos dispositivos ligados no circuito, corroendo ou até causando a quebra do isolamento do enrolamento do motor. Isso acontece devido às variações de amplitude e frequência destes transientes.
Uma das consequências de problemas no isolamento ou enrolamento do motor é a interrupção da sua operação, o que pode causar uma parada na linha de produção a ele associada.
As causas de transientes de tensão podem ter várias origens -dentro e fora da planta-, como cargas adjacentes no liga-desliga, fator de correção de potência dos bancos capacitores, entre outros. Como são ocorrências mais raras, muitas vezes é difícil encontrar a fonte do problema.
Um transiente, por exemplo, pode aparecer em um cabo de controle, e isso não necessariamente implicar em danos diretos no equipamento. No entanto, uma falha prematura no motor acaba desencadeando paradas não planejadas, que comprometem a produtividade.
8. Distorção de harmônicas
As harmônicas são os componentes de alta frequência de um sinal elétrico. Basicamente, são qualquer fonte adicional indesejada de alta frequência que fornecem energia aos enrolamentos no motor. Embora tal energia adicional não seja utilizada para rodar o eixo do motor, ela circula nos rolamentos, o que acaba contribuindo com perdas de energia interna (que acontecem em forma de geração de calor).
Tais perdas, ao longo do tempo, podem causar a deterioração da capacidade de isolamento dos enrolamentos. Em consequência disso, podemos observar problemas como aumento da temperatura de operação do ativo, perda gradual de eficiência do motor e custos adicionais de manutenção.
Qualquer sistema que serve cargas eletrônicas está sujeito a distorção de harmônicas. No entanto, é preciso investigar a origem dessas distorções para analisar se essas ocorrências estão fugindo à normalidade e podem vir a prejudicar o seu ativo.
Comece utilizando um analisador de qualidade e energia. Com ele, é possível fazer a medição e monitoramento dos níveis da corrente elétrica e das temperaturas nos transformadores. Os resultados mostrarão se estes índices estão ou não acima do que é considerado normal. Para conferir os níveis aceitáveis de distorção de harmônicos, consulte a norma IEEE 519-1992.
9. Corrente Sigma
São as correntes parasitas que circulam por um circuito elétrico, geradas por frequência no sinal, nível de tensão, capacitâncias e indutâncias associadas aos condutores elétricos. Ao circularem por sistemas de proteção para terra, as correntes sigma podem causar disparos intempestivos e até mesmo o excesso de calor nos enrolamentos do motor.
As sigma são encontradas nos cabos do motor, e representam a soma da corrente das três fases em qualquer ponto no tempo. Um cenário ideal estabelece que a soma das correntes seja sempre igual a zero, ou seja, a corrente de retorno a partir da unidade deveria se igualar à corrente para a unidade.
Para prevenir o problema, é recomendável utilizar condutores bem dimensionados e de qualidade. Também evite soldas ou conexões inadequadas no condutor.
10. Fases desbalanceadas
Os motores mais comuns utilizados na indústria são os do tipo indução com gaiola de esquilo, assíncronos e alimentados por circuitos trifásicos. Para o seu bom funcionamento, é importante que as três fases que alimentam o estator estejam balanceadas.
O que acontece muitas vezes na indústria é que grande parte dos sistemas de distribuição trifásicos servem cargas monofásicas. Então, quando ocorre um desequilíbrio na distribuição de carga de impedância, o problema pode se desencadear para as três fases, gerando um fluxo de correntes excessivas que culminam no aumento da temperatura de operação.
Uma vez que observamos fases desbalanceadas, esse desequilíbrio pode culminar em situações de parada, superaquecimento e problemas no isolamento dos enrolamentos do motor.
Como sensores IoT mudam a detecção dessas falhas no chão de fábrica
A maioria das 10 falhas listadas acima compartilha uma característica: começam pequenas, evoluem por dias ou semanas, e só viram parada quando o sintoma já está avançado. Inspeção em rota com coletor portátil tira uma foto pontual desse processo. O que muda quando há sensor IoT instalado no motor é a resolução temporal: a degradação passa a ser acompanhada continuamente, não em janelas de medição com semanas de intervalo entre uma e outra.
Na prática, isso significa que desalinhamento progressivo aparece como tendência crescente no espectro de vibração antes de virar carga assimétrica no rolamento. Sobreaquecimento por sobrecarga é flagrado nas primeiras horas de operação fora da faixa, não no turno seguinte quando o operador percebe o cheiro.
Degradação de isolamento da bobina, que é uma das falhas mais difíceis de prever por inspeção visual, gera assinatura elétrica e térmica que sensor contínuo captura semanas antes do curto.
O que torna isso operacionalmente viável hoje é a combinação de sensores sem fio com baixo custo de instalação (sem necessidade de cabeamento ou interrupção da máquina), bateria de longa duração e plataforma que interpreta o sinal antes de chegar na equipe. Sem essa última camada, mais sensor vira mais alerta, e mais alerta vira ruído.
Como evitar as falhas comuns em motores elétricos?
Como observamos nos exemplos acima, além das atividades como inspeções regulares, outras medidas podem ser tomadas para assegurar uma operação eficiente, sem a ocorrência de paradas repentinas e eventuais prejuízos que uma interrupção na produção pode causar à indústria.
A plataforma de monitoramento online da Tractian, desenvolvida com o objetivo de facilitar o dia a dia do gestor de manutenção, consegue identificar inúmeros tipos de anomalias e gerar insights capazes de evitar falhas inesperadas no seu motor elétrico.
Conheça aqui todos os ativos que o nosso sensor monitora e leve nossa solução para facilitar o dia a dia da sua indústria.