
El motor eléctrico es el activo rotativo más común en cualquier planta industrial. También es el que más fallas genera. La mayoría de esas fallas no ocurren de golpe: se desarrollan durante días, semanas o meses antes de convertirse en un paro.
Un sensor de vibración instalado en el punto correcto detecta esa progresión antes de que el daño sea irreversible. Pero para que el monitoreo sea efectivo, el equipo de mantenimiento necesita entender qué fallas detecta, cómo se manifiestan en la señal y qué hacer cuando llega la alerta.
Este artículo cubre los cuatro modos de falla más frecuentes en motores eléctricos, cómo posicionar el sensor para capturarlos, cómo interpretar las alertas y qué límites tiene el análisis de vibración cuando actúa solo.
Por qué el motor eléctrico concentra tantas fallas mecánicas
El motor transmite fuerza a través de un eje que gira a alta velocidad, conectado a una carga que tiene sus propias dinámicas. Cualquier desequilibrio en esa cadena, ya sea en el rotor, en el acoplamiento o en los rodamientos, se manifiesta como vibración.
Cuanto más tiempo pasa sin atención, más se acelera el deterioro de los componentes adyacentes. Un desbalance que genera vibración moderada puede, en semanas, convertir un rodamiento en buen estado en uno que necesita reemplazo urgente.
Los motores eléctricos concentran fallas también porque son los activos que más intervenciones reciben. Cada vez que un motor se desmonta y vuelve a montarse, existe riesgo de desalineación, de instalación incorrecta de rodamientos o de contaminación en los puntos de lubricación. El mantenimiento correctivo mal ejecutado es una de las principales fuentes de fallas en motores.
En plantas con muchos motores idénticos o similares, el monitoreo de condición permite identificar cuál de ellos está degradándose antes de que falle, sin necesidad de inspeccionar todos con la misma frecuencia. La comparación entre activos similares revela anomalías que serían invisibles al analizar cada motor de forma aislada.
Las cuatro fallas que un sensor de vibración detecta en un motor
Desbalance del rotor
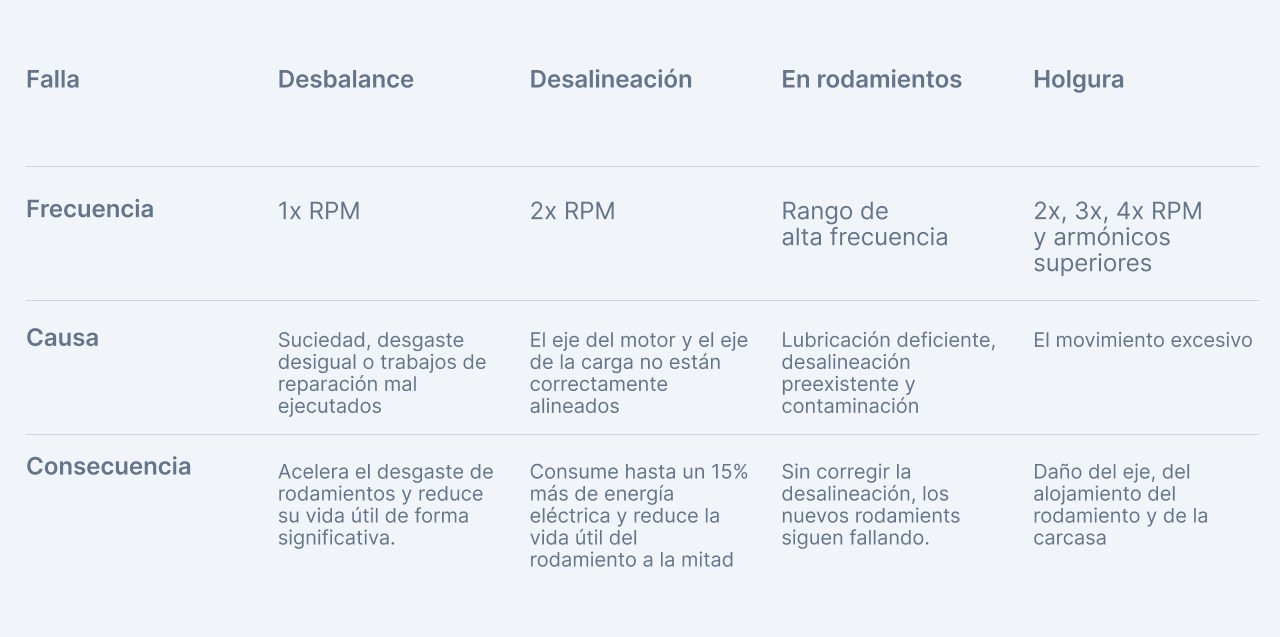
Ocurre cuando la masa del rotor no está distribuida uniformemente alrededor del eje de rotación. Genera vibración radial con un pico dominante en 1x RPM. Es una de las firmas espectrales más reconocibles y consistentes.
Sus causas más comunes en planta son la acumulación de suciedad en los elementos giratorios, desgaste desigual o trabajos de reparación mal ejecutados donde no se restituyó el balance original del rotor.
Si no se atiende, el desbalance acelera el desgaste de rodamientos y reduce su vida útil de forma significativa. La fuerza centrífuga generada por el desequilibrio crea cargas cíclicas que el rodamiento no estaba diseñado para absorber de forma continua.
La corrección es relativamente sencilla cuando se detecta a tiempo: un rebalanceo preventivo durante una parada planificada. Ignorarlo puede derivar en daño de rodamientos, sellos y carcasa, convirtiendo una intervención de horas en una de días.
Desalineación
Sucede cuando el eje del motor y el eje de la carga no están correctamente alineados. La firma espectral muestra energía predominante en 2x RPM, y en casos más severos en 3x RPM. Dependiendo del tipo de desalineación, angular o paralela, el patrón varía.
Es una de las fallas más frecuentes después de intervenciones de mantenimiento donde el motor fue retirado y vuelto a montar. La precisión en la alineación depende del cuidado y las herramientas del técnico que ejecutó la reinstalación.
La desalineación genera cargas mecánicas excesivas en rodamientos y acoplamientos. Un motor que opera desalineado puede consumir hasta un 15% más de energía eléctrica y reducir la vida útil del rodamiento a la mitad.
Implementar monitoreo de vibración post-intervención como verificación de calidad del mantenimiento es una práctica que muchas plantas adoptan después de descubrir que una proporción significativa de sus reinstalaciones generaba niveles de desalineación inaceptables.
Fallas en rodamientos
Los rodamientos son el componente más propenso a falla en un motor eléctrico. Su degradación genera señales en frecuencias características según la geometría del rodamiento: frecuencia de paso de bola por pista interior, pista exterior, frecuencia de jaula y de elemento rodante.
Estas frecuencias aparecen en el rango de alta frecuencia, que solo un sensor con rango adecuado puede capturar. Un sensor que mide hasta 5 kHz puede perder las señales tempranas de falla en rodamientos que aparecen entre 10 y 40 kHz.
Las causas principales son lubricación deficiente, desalineación preexistente y contaminación. En muchos casos, las fallas de rodamiento son consecuencia de otros problemas no resueltos: un rodamiento que opera desalineado falla antes de tiempo, y reemplazarlo sin corregir la desalineación garantiza que el nuevo rodamiento también fallará prematuramente.
El análisis de vibración en rodamientos mediante técnicas como la FFT y el análisis de envolvente permite identificar el elemento específico con falla, la pista interior, la pista exterior, el elemento rodante o la jaula, con semanas de anticipación respecto a la falla funcional.
Holgura mecánica
Se produce por desgaste en los soportes del motor, tornillos de fijación flojos o ajuste incorrecto entre componentes. Genera múltiplos de la frecuencia de rotación en el espectro: 2x, 3x, 4x RPM y armónicos superiores.
A diferencia del desbalance y la desalineación, la holgura mecánica tiende a empeorar progresivamente. El movimiento excesivo genera impactos repetidos que aceleran el desgaste de todos los componentes afectados.
Puede provocar daño en cascada si no se detecta a tiempo. Una holgura no resuelta en el soporte del motor puede derivar en daño del eje, del alojamiento del rodamiento y de la carcasa, multiplicando el costo de la intervención.
Es uno de los modos de falla más difíciles de detectar con inspección visual: el juego excesivo puede no ser perceptible a simple vista pero sí generar la firma espectral característica en el analizador o en el sistema de monitoreo continuo.
Dónde colocar el sensor en un motor
La posición del sensor determina qué información captura. Un sensor bien montado en el punto equivocado puede no detectar la falla que más importa.
La regla general es instalar el sensor lo más cerca posible del rodamiento de interés, en la dirección en que la falla genera mayor amplitud de vibración. En la práctica, esto se traduce en puntos de medición específicos según qué se quiere detectar.
Puntos de medición recomendados
Lado del acoplamiento. Capta desalineación y vibración transmitida desde la carga. Es el punto más informativo para detectar problemas en la interfaz motor-carga y para verificar la calidad de las intervenciones de alineación.
Lado opuesto al acoplamiento. Más sensible a problemas internos del motor como desbalance del rotor. Al estar alejado de la carga, la señal que captura refleja principalmente el estado del motor y sus componentes internos.
Rodamiento delantero y trasero en ejes de mayor carga. Detección directa de fallas en rodamientos. La instalación en ambos rodamientos permite identificar si el problema está en el lado de la carga o en el lado opuesto, lo que orienta el diagnóstico.
Orientación del sensor
La vibración radial y la axial no dicen lo mismo. El desbalance se expresa principalmente en dirección radial. La desalineación angular tiene componente axial significativa.
Un sensor uniaxial captura solo la dirección en que está orientado. Si está montado en posición radial, perderá información sobre la desalineación axial. Si está en posición axial, puede subestimar el desbalance.
Un sensor triaxial captura las tres direcciones simultáneamente y permite una lectura más completa de la condición del activo sin necesidad de planificar la orientación de montaje ni de instalar múltiples sensores en el mismo punto.
Cómo leer una alerta de vibración en un motor
Recibir una alerta no es suficiente. La alerta debe decirle al técnico qué está pasando, dónde y con qué nivel de urgencia. Un sistema que solo genera notificaciones de "vibración alta" sin contexto adicional transfiere al técnico la carga de diagnóstico que debería hacer la plataforma.
Un sistema de alertas bien estructurado distingue al menos tres niveles de urgencia, cada uno con una acción asociada diferente. Ese esquema permite priorizar las intervenciones sin sobresaturar al equipo con falsas urgencias ni dejar pasar fallas reales.
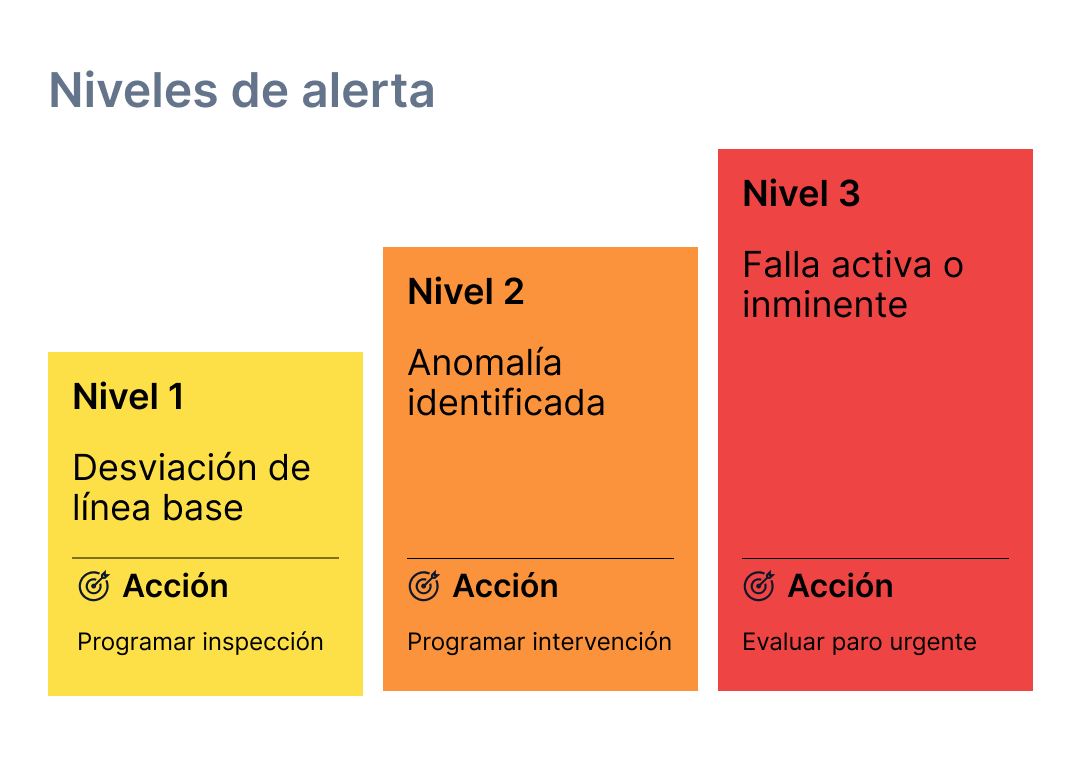
Alerta de nivel 1: desviación de línea base
La vibración global del motor subió por encima de su patrón histórico. Aún dentro de límites aceptables según norma, pero la tendencia es ascendente y eso es lo que importa. Un valor dentro de norma que lleva tres semanas creciendo es más preocupante que un valor alto que lleva meses estable.
Acción: programar inspección en el siguiente turno, sin paro inmediato. El técnico verifica en campo, confirma la tendencia y define si hay que escalar la prioridad.
Alerta de nivel 2: anomalía identificada
El análisis espectral muestra un pico significativo en una frecuencia característica de falla. El sistema identifica el modo de falla probable, el componente afectado y la severidad estimada.
Acción: programar intervención dentro de la próxima ventana de mantenimiento planificado. El técnico tiene tiempo para preparar materiales, coordinar con producción y ejecutar la intervención sin paro de emergencia.
Este nivel es donde el monitoreo continuo genera más valor. La detección anticipada permite convertir lo que podría haber sido un paro no programado en una intervención planificada, con todo lo que eso implica en términos de costo, seguridad y eficiencia.
Alerta de nivel 3: falla activa o inminente
La amplitud de vibración supera los límites críticos y la progresión es rápida. El riesgo de falla catastrófica es alto. En este punto, cada hora de operación adicional aumenta el riesgo de daño en cascada.
Acción: evaluar paro programado urgente o monitoreo intensivo hasta la intervención. La decisión depende del impacto en producción y de la disponibilidad de un respaldo. Lo que no es opción es ignorar la alerta.
En la mayoría de los casos, llegar a una alerta de nivel 3 en un activo bajo monitoreo continuo indica que la respuesta a las alertas de nivel 1 y 2 anteriores fue tardía o insuficiente. El sistema dio tiempo; la operación no aprovechó la ventana.
Lo que la vibración no detecta sola en un motor
El análisis de vibración cubre las fallas mecánicas con gran efectividad. Pero un motor también puede fallar por causas que no generan señal vibratoria significativa hasta etapas avanzadas.
Las fallas eléctricas son el principal punto ciego del análisis de vibración. Desbalance de tensión en la alimentación, fallas en el bobinado del estátor, corrientes de fuga en rodamientos inducidas por variadores de frecuencia: todos estos problemas pueden causar fallas graves sin generar una firma vibratoria clara hasta que el daño ya es severo.
El monitoreo de temperatura complementa la vibración para algunos de estos escenarios. Un motor con problemas en el bobinado suele mostrar elevación de temperatura antes de que la vibración cambie significativamente. La temperatura también revela problemas de lubricación que la vibración detectaría más tarde.
El análisis de corriente eléctrica (MCSA, Motor Current Signature Analysis) es la técnica más efectiva para detectar fallas eléctricas en motores. Aunque requiere equipamiento adicional, en motores de alta criticidad la combinación de vibración, temperatura y corriente ofrece la cobertura diagnóstica más completa.
Criterios para priorizar qué motores monitorear primero
En una planta con decenas o cientos de motores, no todos justifican monitoreo continuo inmediato. La priorización debe basarse en la combinación de impacto en producción e historial de fallas.
Los primeros candidatos son los motores cuyo paro detiene una línea completa o un proceso crítico. El costo de un paro no programado en esos activos justifica el costo del sensor en las primeras horas de operación adicional garantizada.
Los motores con historial de fallas recurrentes son el segundo grupo de prioridad. Si un motor ha fallado tres veces en dos años, es un candidato evidente para monitoreo continuo. La ruta mensual ya demostró que no es suficiente para ese activo.
Los motores de difícil acceso o en zonas de riesgo para el técnico también justifican la inversión. Si llegar al activo implica trabajar en altura, en espacio confinado o en zonas con exposición a sustancias peligrosas, el sensor continuo elimina la necesidad de la visita periódica.
Cómo verificar la efectividad del monitoreo después de la instalación
Instalar el sensor no termina la implementación. El paso siguiente es verificar que el sistema está capturando la información que necesita capturar.
La primera verificación es el rango de frecuencia. Con el motor en operación, el espectro debe mostrar con claridad las frecuencias características del activo: 1x RPM para el desbalance potencial, las frecuencias de los rodamientos instalados, las frecuencias de engrane si hay reductor asociado. Si esas frecuencias no aparecen con claridad, hay un problema de montaje o de rango del sensor.
La segunda verificación es la línea base. Después de dos o tres semanas de operación normal sin cambios en el proceso, la plataforma debe haber construido una línea base estable. Si la línea base muestra variaciones erráticas, puede indicar un problema de montaje del sensor o variaciones en el proceso que el sistema debe aprender a contextualizar.
La tercera verificación es la consistencia de las alertas. En las primeras semanas, el equipo debe registrar todas las alertas generadas y confirmar en campo si correspondían a condiciones reales o a variaciones normales del proceso. Ese registro permite ajustar la sensibilidad del sistema y reduce los falsos positivos en las semanas siguientes.
Integrar el monitoreo de motores en el flujo de mantenimiento preventivo existente
El monitoreo continuo no reemplaza el mantenimiento preventivo en motores: lo complementa. Los cambios periódicos de lubricación, la verificación de conexiones eléctricas y la inspección visual siguen siendo necesarios.
Lo que cambia es la frecuencia y el alcance de esas inspecciones. En lugar de inspeccionar todos los motores con la misma frecuencia, el sistema de monitoreo indica cuáles necesitan atención y cuáles están en buen estado. Los recursos del equipo de mantenimiento se concentran donde son más necesarios.
Las intervenciones preventivas también generan datos valiosos para el sistema de monitoreo. Cuando un técnico cambia el lubricante de un rodamiento, esa intervención queda registrada y el sistema interpreta correctamente la variación en la firma de vibración que puede ocurrir en las horas siguientes al cambio.
Sin esa documentación, el sistema podría interpretar el aumento de vibración post-lubricación como una alerta de degradación. Con ella, contextualiza la variación y no genera una falsa alarma. Ese es un ejemplo concreto de cómo la integración entre el proceso de mantenimiento y el sistema de monitoreo mejora la calidad de los diagnósticos.
Smart Trac de Tractian: vibración y ultrasonido en un solo sensor para motores
Smart Trac combina vibración y ultrasonido en un sensor que captura simultáneamente los dos rangos de frecuencia más relevantes para la detección de fallas en motores: el rango de vibración clásica para desbalance, desalineación y holgura, y el rango de ultrasonido para fallas tempranas de rodamientos y problemas de lubricación.
La IA de Tractian aprende el comportamiento específico de cada motor y detecta desviaciones respecto a su línea base histórica, no respecto a tablas genéricas de severidad. Eso reduce los falsos positivos y aumenta la confianza del equipo en las alertas.
Las alertas llegan con diagnóstico de causa raíz: el técnico sabe si está ante un desbalance, una desalineación, un rodamiento en degradación o una holgura, antes de acercarse al activo. Eso reduce el tiempo de diagnóstico en campo y aumenta la probabilidad de resolver el problema en la primera intervención.
La plataforma también registra el historial completo de alertas e intervenciones de cada motor. Con el tiempo, ese historial revela patrones que no son visibles en el análisis de un solo evento: qué motores fallan con mayor frecuencia, en qué condiciones de operación, y si existe una causa raíz común que no ha sido resuelta.
La instalación es no invasiva, en minutos y sin interrumpir la producción. La conectividad celular elimina la dependencia de la red de la planta y permite desplegar sensores en cualquier zona sin proyecto de infraestructura previo.
Conoce Smart Trac de Tractian y evalúa cuáles de tus motores críticos deberían tener monitoreo continuo desde hoy.