Motor elétrico é o ativo mais numeroso de qualquer planta industrial. É também o que mais recebe monitoramento genérico: um sensor instalado, um alarme configurado por nível absoluto e, no fim das contas, pouca análise de causa.
O problema disso é que o motor elétrico falha de formas muito diferentes. Falha mecânica de rolamento tem assinatura espectral distinta de desbalanceamento de rotor, que tem assinatura distinta de desalinhamento motor-carga, que tem assinatura distinta de barra de rotor quebrada.
E quando o sensor está configurado só para alarmar por amplitude global, nenhuma dessas distinções aparece antes da falha estar avançada.
Neste artigo, te mostramos como usar o sensor de vibração para monitoramento efetivo de motores elétricos: quais modos de falha mecânicos ele captura e onde aparecem no espectro, como diferenciar falha mecânica de falha elétrica com o mesmo sensor, e quais são os requisitos técnicos que determinam a eficácia do monitoramento.
Leia também:
- Como priorizar ordens de serviço com dados de condição
- Benefícios da análise de vibração em redutores industriais
- Falha durante a safra: como antecipar com sensor de vibração
Modos de falha mecânicos e o que o sensor de vibração captura
Rolamento
Em motores de indução de média e alta potência, os rolamentos estão entre os componentes com maior probabilidade de falha ao longo da vida útil do ativo. As condições de operação variam conforme o tipo de carga acoplada, a tensão de correia e o estado de alinhamento do conjunto, e tudo isso influencia o ritmo de degradação.
Um ponto específico em motores elétricos: corrente passando pelo rolamento gera fluting nas pistas, um defeito de progressão mais rápida que o desgaste mecânico convencional, mas com assinatura espectral semelhante.
O sensor captura essa progressão em duas janelas distintas. Nos estágios iniciais, o envelope em alta frequência e o ultrassom identificam o defeito antes de qualquer frequência de defeito visível no espectro convencional.
À medida que o dano avança, BPFO, BPFI, BSF e FTF aparecem com amplitude crescente em baixa frequência. Monitorar a taxa de crescimento dessas frequências ao longo do tempo, não só a amplitude em um dado momento, é o que permite distinguir progressão normal de aceleração por corrente elétrica.
Desbalanceamento de rotor
O desbalanceamento de rotor tem duas origens típicas: distribuição assimétrica de massa desde a fabricação ou última manutenção, e dano ao rotor em operação, como corrosão de superfície em ambientes agressivos ou deformação por temperatura excessiva.
O sensor identifica pelo pico dominante em 1× RPM com fase estável ao longo do tempo. Em motores com VFD, esse pico se desloca conforme a velocidade muda e o magnetômetro integrado garante que a análise sempre correlacione a frequência do pico com o RPM real do eixo naquele instante, não com o RPM nominal de placa.
Desalinhamento motor-carga
O desalinhamento entre eixo do motor e eixo da carga é uma das causas mais comuns de sobrecarga de rolamento e falha prematura de vedação. Pode se originar na instalação, por dilatação térmica diferencial durante a operação ou por assentamento de base ao longo do tempo.
O sensor diferencia os dois tipos pela combinação de eixos.
- Desalinhamento angular eleva 2× RPM com maior expressividade no sinal axial.
- Desalinhamento paralelo eleva 1× RPM radial com crescimento em axial.
Um sensor que cobre só o eixo radial tem visibilidade reduzida sobre ambos, ou seja, o diagnóstico diferencial depende de monitorar radial e axial simultaneamente.
Folga de base ou pé manco
Folga mecânica na base do motor se desenvolve por fretting nos parafusos de fixação por vibração acumulada. O pé manco ocorre quando a deformação de base faz com que um ou dois pés do motor percam contato com a superfície de apoio, uma condição que se instala silenciosamente e sobrecarrega os pontos de fixação restantes.
O sensor identifica a folga genérica pela série de harmônicas de rotação com piso elevado. O pé manco vai além: gera assimetria de fase entre os mancais dos dois lados do motor. Comparar os sinais dos dois pontos simultaneamente (algo viabilizado pela sincronização de coleta entre sensores) é o que permite separar os dois modos e definir a ação correta antes de abrir a máquina.
Como o sensor de vibração diferencia falha mecânica de falha elétrica no espectro
Essa é a capacidade que separa um programa de monitoramento de motores funcionando de um programa que só registra o que já é óbvio.
Falhas elétricas em motores de indução — barra de rotor quebrada, excentricidade de rotor, problemas de enrolamento — se manifestam no espectro de vibração com assinaturas distintas das falhas mecânicas. O analista que não sabe identificar essas assinaturas vai ou ignorar o sinal ou diagnosticar erroneamente como problema mecânico.
Veja como um sensor de qualidade diferencia essas falhas:
Coleta contínua captura o momento do desligamento
O teste de coast-down, que consiste em uma análise do espectro durante a desaceleração após o desligamento do motor, é uma das formas mais confiáveis de separar falha mecânica de falha elétrica.
Quando o motor é desligado, as frequências elétricas (relacionadas à frequência de linha e ao campo eletromagnético do estator) desaparecem imediatamente. As frequências mecânicas (1× RPM, harmônicas de rotação, frequências de defeito de rolamento) persistem durante toda a desaceleração, diminuindo proporcionalmente com a queda de velocidade.
Qualquer pico que some instantaneamente no desligamento tinha origem elétrica. Qualquer pico que persiste e se desloca com a velocidade durante a desaceleração tem origem mecânica.
Coletor portátil não captura esse momento: a coleta é feita com o motor em regime e o operador está presente para iniciar e encerrar manualmente. Enquanto isso, o sensor instalado de forma contínua registra o desligamento quando ele acontece, sem depender de nenhuma ação do time.

Magnetômetro integrado viabiliza o cálculo de slip frequency
Barra de rotor quebrada em motor de indução gera bandas laterais em torno de 1× RPM, espaçadas pela slip frequency, o que corresponde à diferença entre a velocidade síncrona e a velocidade real do rotor, expressa em Hz.
O problema é que a slip frequency é pequena, tipicamente entre 0,5 Hz e 3 Hz em motores industriais de 4 ou 6 polos sob carga nominal. Para identificar bandas laterais espaçadas em 1 Hz em torno de um pico de 25 Hz (1.500 RPM), o sensor precisa de resolução espectral fina e precisa saber o RPM real do eixo naquele instante e não o RPM nominal de placa.
Um motor operando sob 70% de carga tem slip diferente do mesmo motor sob 100% de carga. Se o analista calcula as bandas laterais esperadas com base no RPM nominal em vez do RPM real, as frequências calculadas ficam levemente deslocadas das frequências reais e a identificação da barra quebrada fica comprometida.
O magnetômetro integrado mede o RPM real do eixo continuamente, sem contato e sem necessidade de encoder externo. Com esse dado, o cálculo de slip frequency é preciso independentemente da carga de operação no momento da análise.
Resolução espectral para enxergar bandas laterais sutis
As bandas laterais de barra de rotor quebrada estão espaçadas em frequências muito próximas ao pico principal de 1× RPM. Nos estágios iniciais, a amplitude dessas bandas é significativamente menor que o pico principal: elas são sutis e exigem resolução espectral suficiente para aparecerem como linhas individuais separáveis, não como alargamento do pico de rotação.
Com resolução inadequada, o analista vê o pico de 1× RPM levemente mais largo e descarta como variação normal. O defeito continua progredindo sem diagnóstico.
O que o sensor de vibração precisa ter para um bom monitoramento contínuo de motores
Amostragem até 64 kHz
Captura falhas de rolamento em alta frequência nos estágios iniciais, antes que qualquer sinal apareça no espectro convencional de baixa frequência. Em motores de alta rotação, onde as frequências de defeito de rolamento são elevadas, cobrir essa faixa não é opcional.
Resolução de espectro
Bandas laterais de barra de rotor quebrada, bandas laterais de engrenamento em motores com redutor acoplado, e harmônicas de folga mecânica que precisam ser separadas individualmente. Todos esses diagnósticos dependem de resolução espectral suficiente para separar linhas próximas.
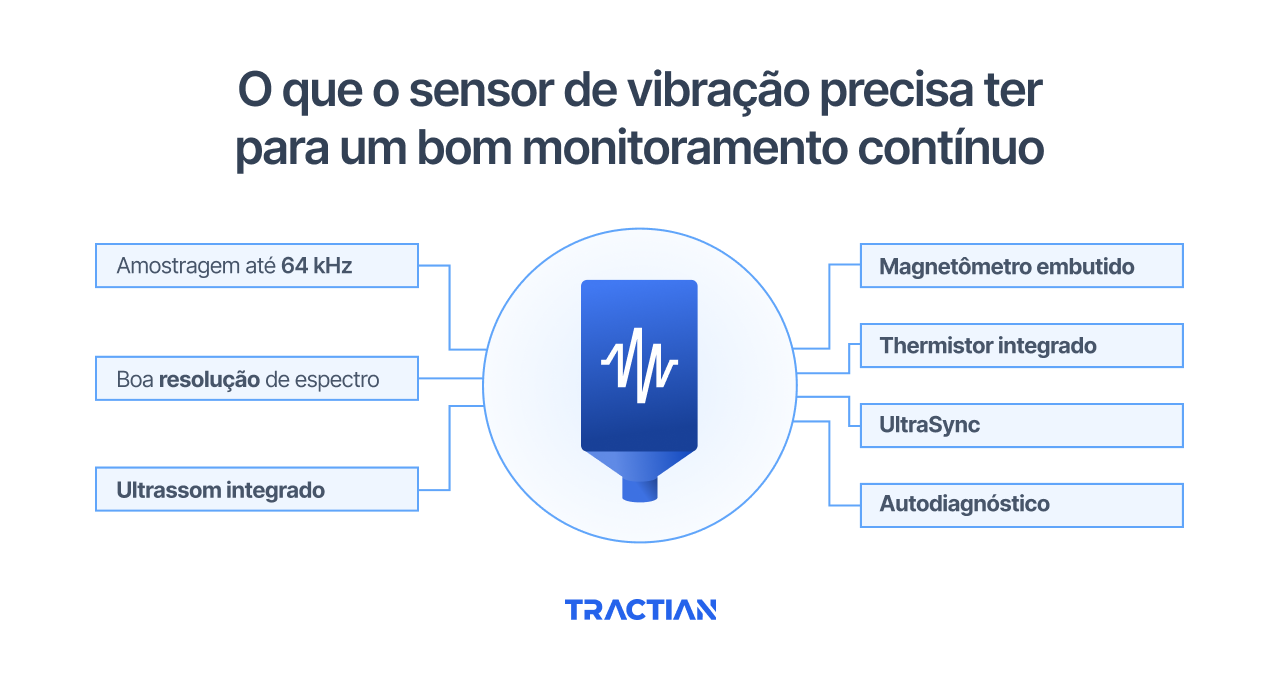
Ultrassom integrado
O ultrassom identifica fricção elevada por lubrificação degradada antes de qualquer frequência de defeito aparecer no espectro de vibração. Em motores com rolamentos de difícil acesso para relubrificação manual, o ultrassom contínuo é o que indica quando o intervalo de lubrificação está inadequado para a condição real de operação. Além disso, é capaz de identificar falhas antes mesmo do espectro da vibração.
Magnetômetro embutido
Mede o RPM real do eixo em tempo real. Crítico para motores com VFD, onde a velocidade varia continuamente e qualquer análise espectral que use RPM nominal em vez de RPM real produz diagnósticos incorretos. Crítico também para o cálculo preciso de slip frequency na detecção de barra de rotor quebrada.
UltraSync
Em motores com múltiplos sensores instalados, a sincronização instantânea de coleta entre os dois pontos é o que permite comparar fase e amplitude com dados coletados sob as mesmas condições de carga. Sem sincronização, diferenças de carga entre as coletas introduzem variação que compromete o diagnóstico diferencial entre desbalanceamento e desalinhamento.
Autodiagnóstico
Sensores capazes de detecção automatizada de mais de 75 modos de falha por redes neurais reduzem a dependência de análise manual espectro a espectro em frotas com muitos motores. O analista recebe o alerta com contexto (incluindo modo de falha identificado, tendência de progressão, urgência estimada) e atua onde o dado aponta, em vez de revisar cada ativo individualmente.
Como a Tractian monitora motores elétricos
Tudo o que um sensor de vibração precisa ter para um bom monitoramento contínuo de motores, a Tractian já tem.
Amostragem até 64 kHz, resolução espectral ampliada, ultrassom contínuo, magnetômetro embutido e sincronização de coleta entre sensores do mesmo ativo: tudo no mesmo hardware, sem depender de múltiplos dispositivos ou de rota manual para cobrir o que o sensor não alcança.
A plataforma processa o histórico de cada motor individualmente, separa variação de processo de degradação real e entrega o alerta com modo de falha identificado, tendência documentada e ação recomendada. O time não revisa espectro de cada ativo, em vez disso, atua onde o dado aponta.
Se algum motor da sua planta falhou nos últimos 12 meses sem aviso prévio, o problema não foi necessariamente a máquina. Foi o monitoramento. Fale com os especialistas da Tractian e veja o que você estava deixando de enxergar.