
No todos los motores fallan igual. La estrategia de mantenimiento que funciona para un motor de jaula de ardilla puede ser completamente insuficiente para uno con variador de frecuencia o uno de imán permanente.
En la mayoría de las plantas industriales, el programa de mantenimiento trata todos los motores eléctricos con el mismo criterio: mismo intervalo de lubricación, misma frecuencia de inspección, mismo umbral de alerta de vibración. Ese enfoque genera dos problemas simultáneos: sobre-mantenimiento en motores que no lo necesitan y sub-mantenimiento en motores cuyos modos de falla específicos el programa no está diseñado para capturar.
Este artículo clasifica los motores eléctricos industriales por tipo, describe los modos de falla dominantes de cada uno y define la estrategia de monitoreo que corresponde a cada caso. El objetivo no es un glosario técnico: es una guía de decisión para el ingeniero de mantenimiento que diseña o revisa el programa de su planta.
Por qué la clasificación importa para el mantenimiento
Cada tipo de motor tiene una arquitectura eléctrica y mecánica distinta. Esa arquitectura define qué componentes pueden fallar, cómo se degrada cada uno y qué señal genera esa degradación. Un programa de mantenimiento que no parte de esa distinción aplica herramientas de diagnóstico en modos de falla que esas herramientas no pueden capturar.
El caso más frecuente: el análisis de vibración estándar configurado para un motor de velocidad fija aplicado a un motor con variador de frecuencia. Las frecuencias características de falla de rodamientos son proporcionales a la velocidad de rotación. En un motor con VFD que opera a velocidad variable, esas frecuencias cambian constantemente. El análisis con frecuencias fijas no detecta la falla: los picos aparecen en distintas posiciones del espectro según la velocidad del momento y el analista los ignora como ruido.
La selección incorrecta de herramienta de diagnóstico es la causa más frecuente de programas de mantenimiento predictivo que no anticipan las fallas que deberían anticipar. El análisis de vibraciones y la interpretación de datos tiene una guía completa sobre cómo leer correctamente la señal de cada tipo de activo.
Clasificación por tipo de corriente
Motores de corriente alterna (CA)
El tipo más extendido en la industria. Operan conectados directamente a la red de corriente alterna o a través de un variador de frecuencia que permite controlar la velocidad. Representan más del 90% de los motores instalados en plantas industriales de manufactura, alimentos, química y minería.
La variedad dentro de los motores de CA es significativa: desde el motor asíncrono de jaula de ardilla estándar hasta el motor síncrono de imán permanente de alta eficiencia. Cada variante tiene modos de falla distintos y requiere estrategias de monitoreo distintas. Tratarlos como una categoría uniforme es el error de origen que genera diagnósticos incorrectos y correctivos inesperados.
Motores de corriente continua (CC)
Menos frecuentes en instalaciones nuevas, pero presentes en plantas con equipos de mayor antigüedad, especialmente en aplicaciones que históricamente requerían control preciso de velocidad y par: trenes de laminación, grúas industriales, prensas de alta fuerza, algunos equipos de minería.
Su presencia en planta implica mayor carga de mantenimiento por la presencia de escobillas y colector: componentes de desgaste que requieren inspección periódica, ajuste de la presión de contacto y reemplazo según el historial de desgaste. En motores CC, la inspección visual periódica del colector es irreemplazable: el color de las marcas de contacto, la condición de las escobillas y el perfil de desgaste del colector son diagnósticos que el análisis de vibración no puede reemplazar.
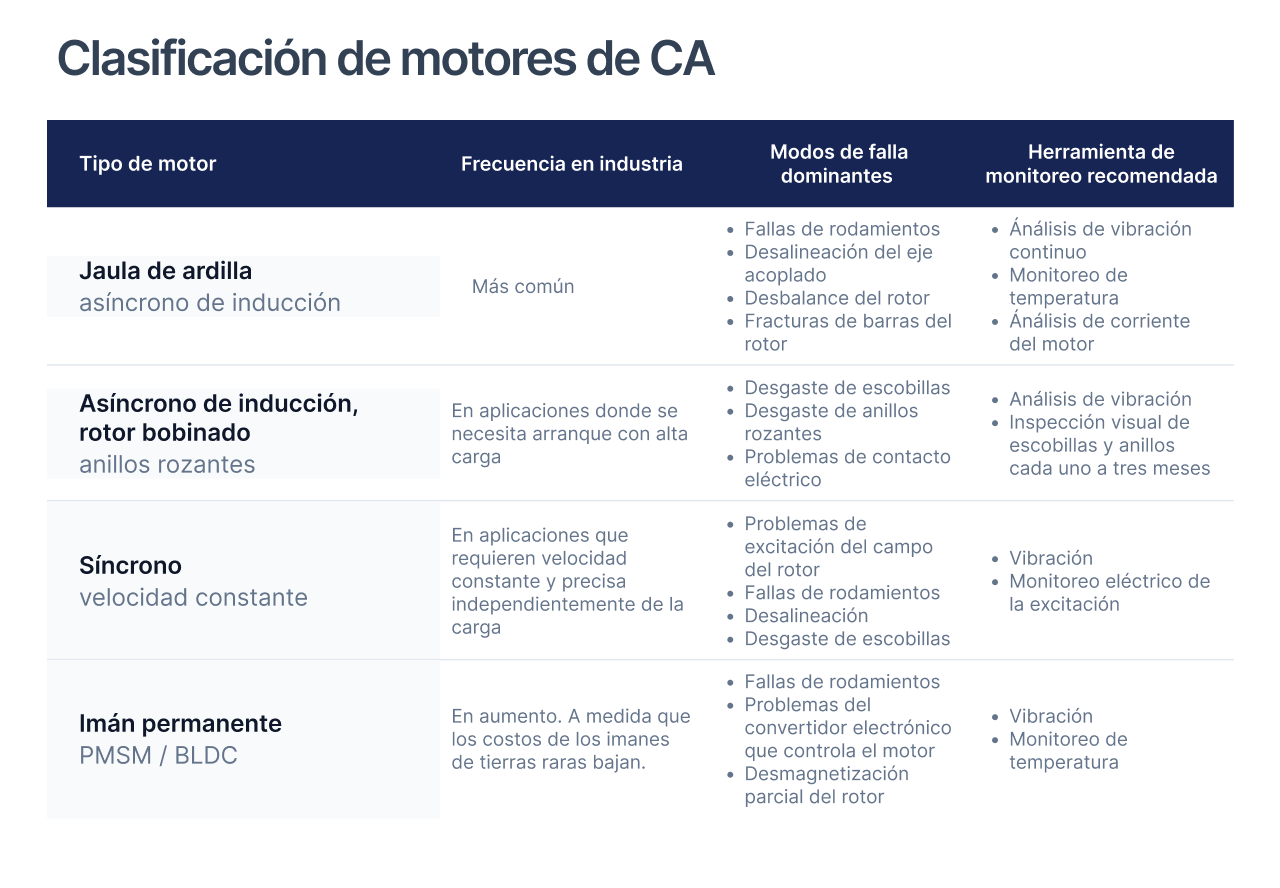
Clasificación de motores de CA: los más críticos en industria
Motor asíncrono de inducción, jaula de ardilla
El motor más común en planta industrial. Su rotor es una jaula de barras conductoras de aluminio o cobre cortocircuitadas entre sí, sin conexiones externas, sin escobillas, sin anillos rozantes. Esa simplicidad mecánica lo hace robusto, de bajo mantenimiento y con vida útil larga bajo condiciones normales de operación.
Modos de falla dominantes: fallas de rodamientos por lubricación inadecuada, desalineación del eje acoplado, desbalance del rotor por acumulación de material o pérdida de masa, y fracturas de barras del rotor por ciclos de arranque frecuentes o sobrecalentamiento repetido. Las fallas de rodamientos representan entre el 40 y el 50% de todas las fallas en motores de inducción.
Estrategia de monitoreo: análisis de vibración continuo para rodamientos, desalineación y desbalance. Monitoreo de temperatura en carcasa para sobrecalentamiento. Para las barras del rotor, el análisis de corriente del motor (MCSA) tiene mayor sensibilidad que el análisis de vibración. BPFO: análisis de vibración en rodamientos para evitar fallas descubre en detalle cómo identificar las frecuencias características de falla en rodamientos de este tipo de motor.
Motor asíncrono de inducción, rotor bobinado (anillos rozantes)
Variante del motor de inducción con bobinado en el rotor conectado externamente a través de anillos rozantes y escobillas. La resistencia externa permite controlar el par de arranque y la velocidad en ciertos rangos, lo que lo hace útil en aplicaciones donde se necesita arranque con alta carga o control básico de velocidad sin variador electrónico.
Modos de falla adicionales respecto al motor de jaula de ardilla: desgaste de escobillas, desgaste de anillos rozantes y problemas de contacto eléctrico que generan chispas y erosión del colector. Esos modos de falla no generan señales de vibración claras: requieren inspección visual periódica complementaria al monitoreo de vibración.
Estrategia de monitoreo: vibración para los modos de falla mecánicos comunes con el motor de jaula de ardilla, más inspección visual de escobillas y anillos cada uno a tres meses según la intensidad de uso. El estado de las escobillas afecta directamente el consumo de corriente del motor: el monitoreo de corriente por fase detecta desequilibrios asociados a mal contacto en los anillos.
Motor síncrono
En el motor síncrono, el rotor gira exactamente a la velocidad del campo magnético del estator, sin deslizamiento. Eso lo hace útil en aplicaciones que requieren velocidad constante y precisa independientemente de la carga, como en algunos compresores de proceso, bombas de alta precisión y generadores industriales.
El rotor requiere excitación del campo magnético, que puede ser externa a través de anillos rozantes o mediante un excitador sin escobillas montado en el mismo eje. Esta necesidad de excitación agrega un modo de falla que no existe en los motores asíncronos: los problemas de excitación que generan pérdida de sincronismo y pueden llevar al paro del motor sin señal de vibración previa significativa.
Modos de falla dominantes: problemas de excitación del campo del rotor, fallas de rodamientos, desalineación y en motores con anillos rozantes, desgaste de escobillas. Estrategia de monitoreo: vibración para los modos mecánicos, más monitoreo eléctrico de la excitación (corriente de campo, tensión de excitación) para detectar problemas en el sistema de excitación antes de que generen pérdida de sincronismo.
Motor de imán permanente (PMSM y BLDC)
El rotor lleva imanes permanentes que generan el campo magnético del rotor, sin bobinado ni sistema de excitación. Alta eficiencia en todo el rango de velocidad, respuesta dinámica rápida, rango de velocidad amplio. Su adopción en aplicaciones industriales nuevas crece a medida que los costos de los imanes de tierras raras bajan y las exigencias de eficiencia energética aumentan.
Modos de falla dominantes: fallas de rodamientos (igual que otros tipos), problemas del convertidor electrónico que controla el motor (el motor síncrono de imán permanente no puede operarse sin convertidor), y desmagnetización parcial del rotor por sobrecalentamiento excesivo. La desmagnetización es un modo de falla silencioso: el motor puede seguir operando con eficiencia reducida durante semanas antes de que la pérdida de par sea detectable operativamente.
Estrategia de monitoreo: vibración para rodamientos, monitoreo del convertidor (alarmas del driver, temperatura del módulo de potencia) y monitoreo de temperatura del motor para prevenir la desmagnetización. El umbral de temperatura crítica para la desmagnetización depende del tipo de imán: los imanes de neodimio de alta temperatura tienen mayor tolerancia que los estándar.
El caso especial: motores con variador de frecuencia (VFD)
Cualquier motor de CA puede operarse con variador de frecuencia. Esa combinación cambia significativamente los modos de falla y hace insuficiente el diagnóstico estándar diseñado para motores de arranque directo. Es el caso más frecuentemente mal atendido en los programas de mantenimiento industrial.
Modos de falla adicionales introducidos por el VFD
Erosión eléctrica de rodamientos (electrical fluting): el VFD induce corrientes de alta frecuencia que circulan por el eje y los rodamientos del motor como camino de baja impedancia hacia tierra. Esas corrientes generan picaduras uniformes en las pistas del rodamiento que progresan hasta el fallo mecánico. El patrón de diagnóstico es característico: el rodamiento falla repetidamente sin causa mecánica aparente y las pistas del rodamiento reemplazado muestran un patrón de picadura regular y periódico. La solución no es un intervalo preventivo más corto: es un anillo conductor de eje o rodamientos con aislamiento eléctrico. Mantenimiento industrial: tipos y por qué el correctivo falla explica por qué este tipo de falla recurrente es una señal de causa raíz no resulta, no de mala suerte.
Sobrecalentamiento por armónicos: la forma de onda no sinusoidal que genera el VFD produce pérdidas adicionales en el bobinado del estator. Motores diseñados para operación con VFD tienen aislamiento reforzado para este estrés dieléctrico adicional. Motores estándar operados con VFD sin filtros de salida acumulan degradación del aislamiento más rápido de lo que el programa preventivo por calendario predice.
Estrés dieléctrico en el aislamiento: los pulsos de tensión de alta frecuencia del VFD tienen tiempos de subida (dV/dt) que estresan el aislamiento de forma diferente a la tensión sinusoidal de red. El resultado es degradación acelerada del aislamiento del bobinado que puede llevar a cortocircuito entre espiras en plazos significativamente menores a la vida útil nominal del motor.
Por qué el diagnóstico estándar no funciona para motores con VFD
Las frecuencias características de falla de rodamientos son proporcionales a la velocidad de rotación. En un motor con arranque directo que opera a velocidad fija, esas frecuencias son constantes y el análisis espectral estándar las identifica claramente. En un motor con VFD que opera a velocidad variable, esas frecuencias cambian con cada variación de velocidad.
El análisis espectral con frecuencias fijas aplicado a un motor con VFD produce un espectro donde los picos de falla de rodamiento aparecen en posiciones distintas según la velocidad del momento de la medición. Si el técnico que interpreta el espectro no sabe que el motor opera con VFD, interpreta esos picos como ruido o como otras fuentes de vibración. La falla progresa sin ser detectada.
La solución es un sensor con seguimiento de RPM en tiempo real que ajusta automáticamente las frecuencias características de falla a la velocidad actual del motor en cada instante de la medición. Con ese seguimiento, el análisis espectral funciona igual que en un motor de velocidad fija, independientemente de cómo varíe la velocidad de operación.
Clasificación por nivel de eficiencia energética (IE)
La norma IEC 60034-30 define cuatro clases de eficiencia para motores de inducción. La clasificación IE es relevante para el mantenimiento porque define las pérdidas eléctricas del motor y, con ellas, la temperatura de operación y la vida útil del aislamiento.
- IE1: eficiencia estándar. En desuso en nuevas instalaciones en la mayoría de los mercados industriales.
- IE2: eficiencia mejorada. Estándar mínimo en muchas regulaciones actuales para motores de uso general.
- IE3: eficiencia premium. El estándar de facto en la mayoría de las aplicaciones industriales nuevas en México y América del Norte.
- IE4: súper premium. Para aplicaciones de alta demanda energética donde el costo del consumo eléctrico justifica la inversión adicional en el motor.
La implicación directa para el mantenimiento: un motor rebobinado que no recupera la clase IE original opera con mayores pérdidas eléctricas, genera más calor en el bobinado y tiene una vida útil del aislamiento más corta que el motor original. Si el bobinado se realiza con materiales de menor clase de temperatura o con menor sección de conductor, la degradación del aislamiento se acelera de forma proporcional a las pérdidas adicionales.
La decisión de reparar vs. reemplazar un motor debe considerar si el rebobinado puede recuperar la clase IE original. Cuando no puede, el costo del consumo eléctrico adicional acumulado durante la vida útil del motor rebobinado puede superar el costo de un motor nuevo IE3. Gestión del mantenimiento: del papel a las decisiones con datos tiene el marco para hacer este cálculo con datos reales de planta.
La matriz de decisión: tipo de motor y estrategia de monitoreo
La clasificación de motores genera una matriz de decisión directa para el ingeniero de mantenimiento: dado el tipo de motor, qué herramientas de monitoreo son necesarias, cuáles son opcionales y cuáles son irrelevantes o incluso contraproducentes si se aplican sin las adaptaciones correctas.
Monitoreo de vibración: aplica a todos los tipos, con matices
El análisis de vibración es la herramienta de monitoreo más efectiva para los modos de falla mecánicos comunes a todos los tipos de motor: fallas de rodamientos, desalineación y desbalance. Aplica a motores de jaula de ardilla, rotor bobinado, síncrono, imán permanente y motores con VFD, con la condición de que en los motores con VFD el sensor tenga seguimiento de RPM en tiempo real.
La frecuencia de muestreo del sensor determina qué modos de falla puede capturar. Para fallas de rodamientos en etapas tempranas, se necesita muestreo hasta al menos 10-20 kHz. Para detección de cavitación en bombas acopladas o para ultrasonido de lubricación de rodamientos, hasta 40 kHz o más.
Monitoreo de temperatura: aplica a todos los tipos, es el indicador más directo
La temperatura de carcasa y rodamientos con tendencia creciente es la señal más accesible para sobrecalentamiento, degradación del aislamiento avanzada y erosión eléctrica en etapas tardías. Un sensor de temperatura continuo en la carcasa detecta la tendencia antes de que se alcance el umbral de disparo del relé térmico, cuando todavía hay ventana de intervención planificada.
En motores de imán permanente, el monitoreo de temperatura tiene prioridad adicional por el riesgo de desmagnetización. En motores con VFD, la temperatura del módulo de potencia del convertidor es tan importante como la temperatura del motor: un convertidor que opera consistentemente cerca de su límite térmico tiene vida útil reducida.
Análisis de corriente (MCSA): esencial para barras de rotor y desequilibrio eléctrico
El Motor Current Signature Analysis es especialmente sensible para la detección de barras de rotor fracturadas en motores de jaula de ardilla y para el desequilibrio de fases en la alimentación. Es también útil para detectar problemas de excitación en motores síncronos y desequilibrios en motores de rotor bobinado con problemas de contacto en los anillos.
El análisis de corriente requiere conexión al tablero de alimentación del motor, no al motor físicamente. Eso lo hace accesible en motores instalados en zonas de difícil acceso físico. Mantenimiento predictivo mediante el análisis de vibraciones complementa esta técnica con la perspectiva del análisis mecánico en activos rotativos.
Inspección visual periódica: irreemplazable en motores con escobillas
Para motores CC, motores de rotor bobinado con anillos rozantes y cualquier motor con sistema de excitación con escobillas, la inspección visual periódica del colector y las escobillas no tiene sustituto técnico equivalente. El análisis de vibración no detecta el desgaste de escobillas ni la erosión del colector de forma directa.
La frecuencia de inspección visual se define por las horas de operación del motor y la tasa histórica de desgaste de escobillas. En motores de uso intensivo, la inspección mensual es la frecuencia de referencia; en motores de uso moderado, trimestral. El registro de la condición encontrada en cada inspección es el historial que permite anticipar cuándo será necesario el reemplazo.

Errores frecuentes en el mantenimiento de motores por tipo
Motor de jaula de ardilla: lubricar por calendario en lugar de por condición
El error más frecuente en motores de jaula de ardilla es la lubricación por intervalo fijo sin considerar la carga real del motor. Un motor al 90% de carga bajo temperatura elevada degrada su lubricante en días; uno al 60% en temperatura ambiente puede aguantar semanas adicionales. La lubricación industrial basada en condición real guiada por ultrasonido, es la herramienta que elimina ese desfase.
Motor con VFD: no comunicar al análisis de vibración que el motor opera con variador
El técnico que configura el análisis de vibración necesita saber si el motor opera con VFD para configurar el seguimiento de RPM. Un motor con VFD analizado con frecuencias fijas genera diagnósticos incorrectos que erosionan la confianza del equipo en el sistema de monitoreo. Ese dato, la presencia del VFD, debe estar registrado en el CMMS como parte de la ficha técnica del activo.
Motor CC: confiar solo en el análisis de vibración
En motores CC, el análisis de vibración detecta los modos de falla mecánicos pero no los eléctricos relacionados con el colector y las escobillas. Un programa que usa solo análisis de vibración en motores CC está ignorando los modos de falla más frecuentes en este tipo de motor. La inspección visual periódica es el complemento necesario.
Motor de imán permanente: operar sin monitoreo de temperatura
La desmagnetización parcial es un modo de falla silencioso que el análisis de vibración no detecta hasta etapas avanzadas. En motores de imán permanente, el monitoreo continuo de temperatura es el primer nivel de protección contra ese modo de falla. Operar un motor PMSM sin monitoreo de temperatura es aceptar el riesgo de una degradación progresiva que no genera señal hasta que el daño en los imanes ya es irreversible.
Integración de la clasificación en el programa de mantenimiento
La clasificación de motores eléctricos por tipo no es un ejercicio de documentación: es el primer paso para construir un programa de mantenimiento diferenciado que asigna las herramientas correctas a los modos de falla correctos de cada tipo de activo.
El proceso práctico: inventariar todos los motores de la planta con su tipo, potencia, aplicación y presencia o ausencia de VFD. Clasificarlos por criticidad. Para los motores críticos, definir qué modos de falla dominantes corresponden a su tipo y qué herramienta de monitoreo los detecta. Configurar el sistema de monitoreo con esos parámetros, no con parámetros genéricos.
Ese proceso transforma el mantenimiento de reactivo a anticipatorio. La gestión del mantenimiento con datos es lo que permite escalar ese proceso a plantas con cientos de motores sin perder precisión en el diagnóstico por activo.
El resultado es un programa donde cada motor recibe exactamente el nivel de atención que su tipo y su criticidad requieren: ni más, que genera costos de mantenimiento innecesarios, ni menos, que genera correctivos de emergencia evitables.
Conoce cómo Tractian monitorea distintos tipos de motores eléctricos en una sola plataforma.