Los motores eléctricos son catalogados como el corazón de cualquier fábrica o industria. Son los responsables de proporcionar torque (aceleración angular) a los ejes rotativos en: bombas de líneas hidráulicas, compresores en líneas de aire comprimido o de vacío, correas transportadoras, brazos robóticos u otros tipos de equipos. Pueden ser usados en prácticamente todos los ambientes industriales, los motores se han convertido en unidades cada vez más complejas y técnicas, donde hacerlos operar con máxima eficiencia es un gran desafío.
La mayoría de los profesionales de mantenimiento ya han lidiado con los motores eléctricos y su funcionamiento dentro de la industria. Sin embargo, aunque no seas de mantenimiento o directamente responsables de ellos dentro de la fábrica, todos saben los problemas mecánicos o eléctricos que pueden hacerlos fallar, causando paradas en líneas de producción y perjuicios económicos a la empresa.
Los factores que llevan a las fallas de los motores eléctricos y sus componentes pueden tener diversas causas. No obstante, la mayoría de esas fallas pueden ser evitadas con equipos de mantenimiento bien entrenados y con la adopción de programas de mantenimiento eficaces, como los sistemas de monitoreo basados en la condición de predecir fallas funcionales en el futuro.
Conocer las principales causas de fallas es fundamental, pues eso puede significar la diferencia entre los costos por tiempo de inactividad del equipo y su uso. Para ayudarte a identificar las fallas más frecuentes, te mostramos a continuación una lista de los 10 tipos de fallas más comunes en motores eléctricos y lo que debes hacer para evitarlas.

10 tipos de fallas más comunes y cómo evitarlas
1. Desalineación
Los problemas relacionados con el alineamiento de los ejes están entre los contratiempos más comunes enfrentados por los profesionales del mantenimiento. Un estudio presentado en la International Maintenance Conference IMC-2012 indicó que más de la mitad de las paradas de máquinas en las industrias están relacionadas con la desalineación entre ejes.
La desalineación ocurre cuando el eje de accionamiento del motor (rotor) o la unidad de acoplamiento no están correctamente alineados con la carga, resultando en la transferencia de esfuerzos mecánicos que aumentan el desgaste del motor y su carga mecánica aparente. Uno de los efectos de este problema es el aumento de la vibración tanto en la carga como en el motor.
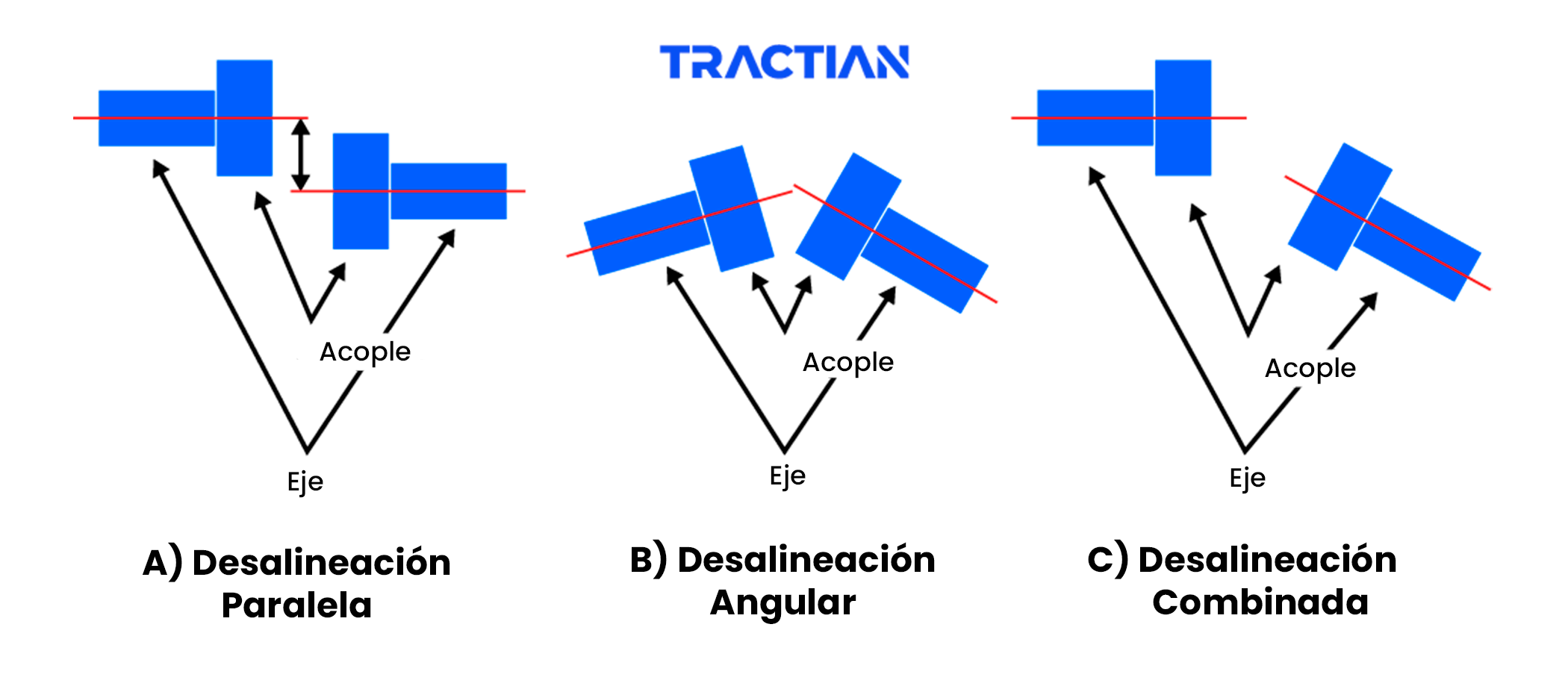
Existen tres tipos de desalineación: paralela, angular o combinada:
- La desalineación paralela ocurre cuando las líneas del centro del eje del motor y de la carga no son colineales.
- Por otra parte, la desalineación angular se evidencia cuando existe un ángulo entre las líneas de centro de ambos ejes, pudiendo éstas interceptarse en sus proyecciones.
- Finalmente, la desalineación combinada, contiene desalineaciones paralelas y angulares, considerándose el tipo de desalineación más común entres las tres descritas anteriormente.
Además del desgaste prematuro en los componentes de rotación del motor, la desalineación causa problemas como la disminución en la capacidad de producción, reducción de la vida útil y eficiencia de trabajo del equipo, así como el aumento en el consumo de la energía eléctrica.
Para evitar este tipo de fallas, se recomienda el monitoreo de parámetros como la temperatura y vibración del equipo. Ahora, los sistemas de mantenimiento predictivo tienen la capacidad de recolectar datos sobre el funcionamiento de una máquina, registrarlos y almacenarlos, consiguiendo así, prevenir las fallas que están a punto de suceder, incluyendo fallas como la desalineación.
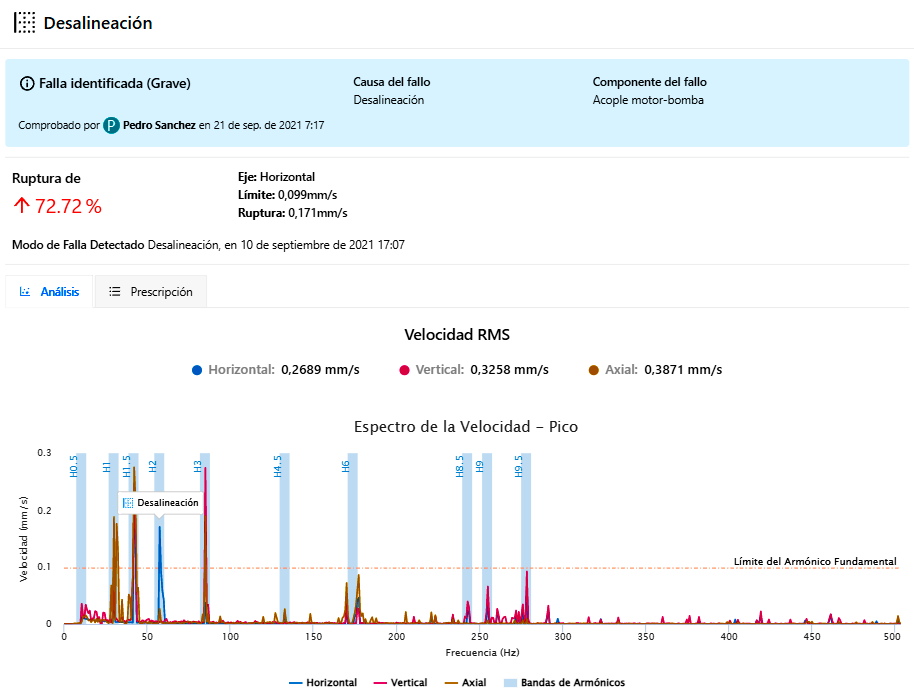
La plataforma Tractian cuenta con algoritmos que actúan como método de detección de anomalías en el funcionamiento del equipo. Los sensores instalados en las máquinas recolectan señales de vibración que son producidas durante el funcionamiento del equipo, donde después de analizarlas, emite alertas que facilitan la identificación de cualquier patrón fuera de lo normal.
Agenda una Demostración con uno de Nuestros Especialistas
2. Sobrecarga
Sucede cuando a un motor se le exige más allá de su torque nominal, osea, la corriente eléctrica de operación está por encima de lo normal, causando sobrecalentamiento. Esto último hace que se reduzca la vida útil del equipo y dependiendo del nivel de sobrecarga, el dispositivo de protección del equipo puede ser accionado, pudiendo causar una parada inesperada en la operación del equipo.
Es posible observar algunas señales cuando un motor presenta problemas de sobrecarga, entre ellas están el aumento del consumo de corriente eléctrica y torque de salida insuficiente. El calor excesivo provocado por el sobrecalentamiento es una de las principales fallas y es el principal factor para el desgaste prematuro en los componentes del motor, con alta probabilidad de llevarlo a una falla permanente.
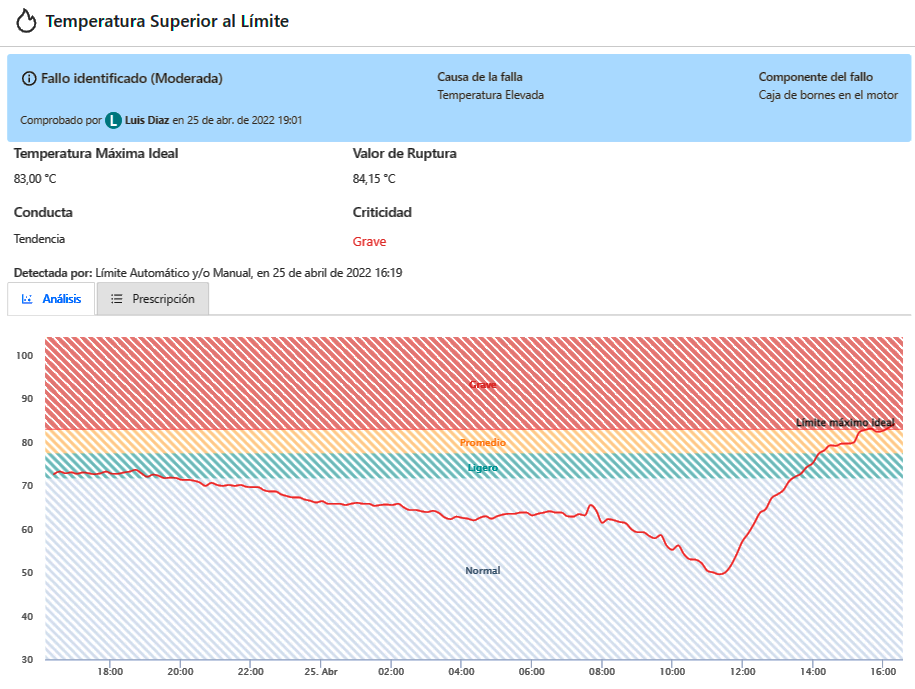
Una de las alternativas para evitar este problema es el monitoreo constante de la temperatura del equipo. Estas inspecciones pueden realizarse a través de inspecciones en las líneas de transmisión de energía con pistolas termográficas o sensores de temperatura. Entre esas opciones, el sensor de Tractian es capaz de identificar aumentos excesivos en la temperatura de las máquinas, ofreciendo un diagnóstico sobre el estado del tablero o caja de conexiones eléctricas del equipo.
3. Pie suave / Pata coja
Se conoce como pie suave cuando la fijación de los apoyos del motor o del equipo acoplado no están asentados o apoyados correctamente sobre su base. Sucede comúnmente ante una mala instalación del equipo, desencadenando tensiones mecánicas por desalineación tanto en los ejes del motor como en la carga.
Esta falla de instalación además puede traer otro problema y es que una vez los apoyos del motor no están equilibrados, la acción de ajustar los tornillos de fijación de cada apoyo puede crear nuevas tensiones mecánicas por desalineación.
Una de las formas de detectar este problema es la simple inspección u observación de los tornillos de fijación en los apoyos. Cuando ocurre un pie suave, generalmente dos tornillos están en posición diagonal. Una analogía simple para visualizar ese tipo de falla es pensar en una silla o en una mesa. Si están con patas desiguales, estas comienzan a balancearse en una determinada posición diagonal.
Para evitar el fenómeno de pie suave, es importante que el motor y la carga estén fijados de forma que el asentamiento no provoque vibraciones adicionales en el equipo, y tampoco una eventual transferencia de esfuerzos para el motor.
Como ya se mencionó anteriormente, el uso de sensores de vibración también puede ayudar en la prevención de este tipo de problemas una vez el sensor sea capaz de medir los índices de la vibración de la máquina.
Debido a sus algoritmos de inteligencia artificial, el sistema de monitoreo online de Tractian consigue generar el AND de vibración del equipo. Se trata de la primera notificación generada por el equipo en aproximadamente 15 días después de que el sensor sea instalado. A partir de allí, los sensores ya pueden generar diagnósticos sobre aumentos en la velocidad o aceleración RMS, o picos anómalos en el espectro de vibración que están fuera del patrón de funcionamiento normal del equipo.

4. Desgaste en los rodamientos
Se estima que gran parte de las fallas en los motores son causadas por el desgaste contínuo en los rodamientos. Las fallas en los rodamientos suceden por diversos motivos, entre ellos: la incorrecta selección del rodamiento con una carga de funcionamiento superior a su límite de diseño, inadecuada lubricación, mecanismo de sellado incorrecto, esfuerzos inducidos en el eje, desalienación, desbalanceo, contaminación en la película lubricante, entre otras causas.
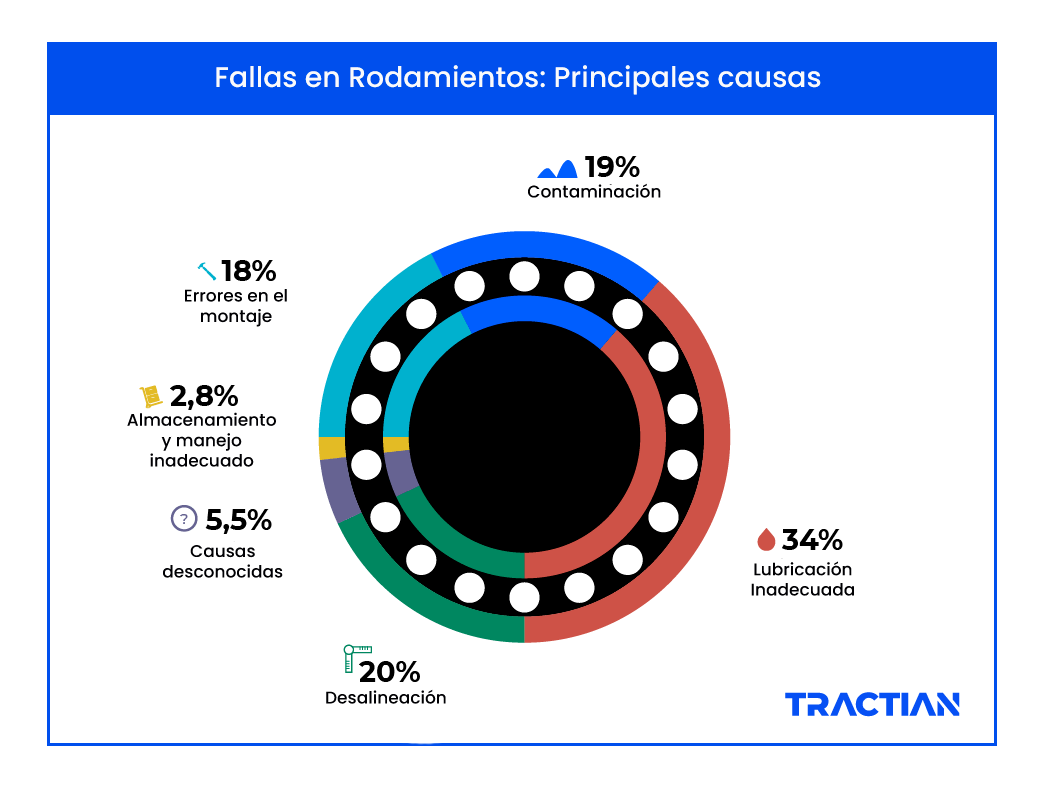
En líneas generales, podemos clasificar las fallas en rodamientos como pre-operacionales y operacionales. Todo lo que es pre-operacional tiene relación con el montaje del rodamiento, como por ejemplo: tolerancias de ajuste erróneas, asientos en el eje mal mecanizados, herramientas de montaje no adecuadas, o incorrecto almacenamiento, etc.
Por otra parte, las fallas operacionales están asociadas a la lubricación y sellado deficiente, fatiga en el material, fluting (paso de corriente eléctrica por el rodamiento) y desalineación operacional.
Las fallas en rodamientos generalmente ocasionan un efecto cascada o bola de nieve que acelera la falla en los motores eléctricos. Para evitar las paradas no planeadas y los costos en reparaciones correctivas, es imprescindible el análisis de vibración en los equipos, lo que permitirá al equipo de mantenimiento determinar las causas iniciales del problema y hasta evitar que se vuelva a repetir.
5. Desbalanceo
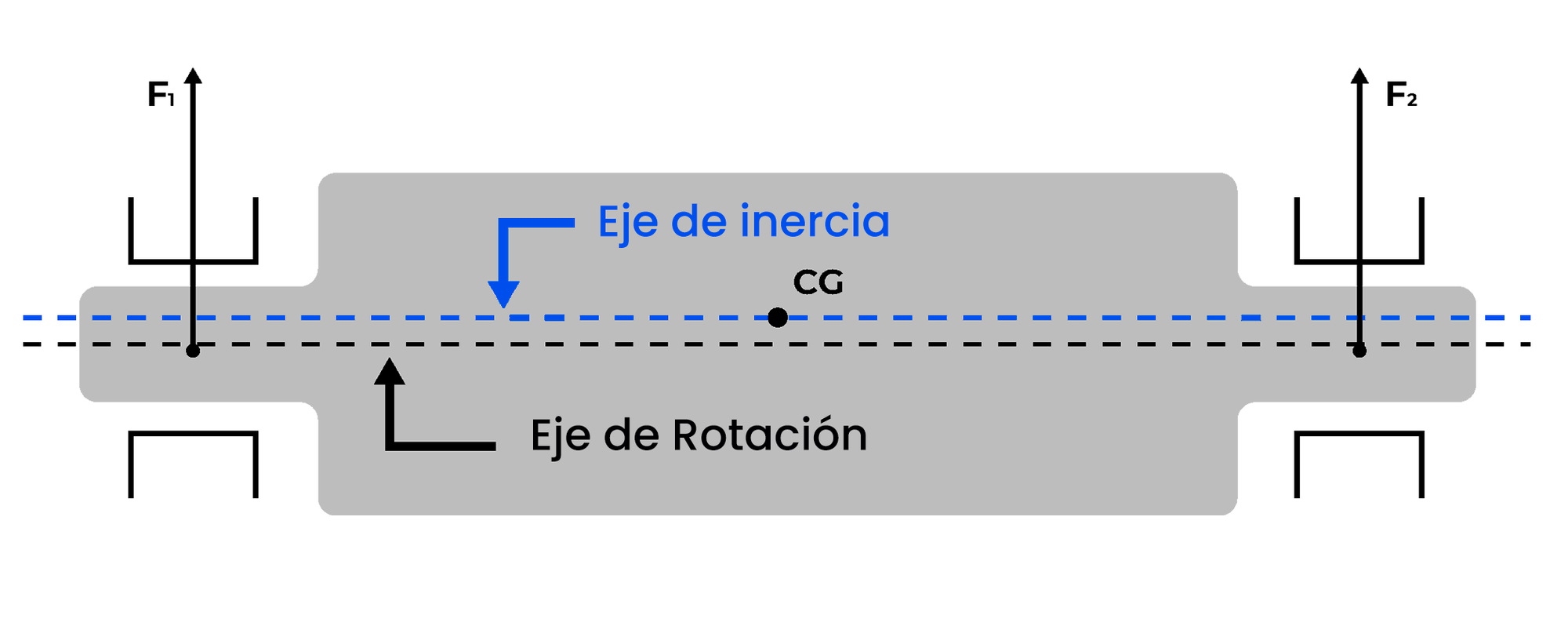
Se habla de desbalanceo cuando la parte giratoria del centro de masa no gira sobre el eje de rotación, causando ese desequilibrio. La distribución irregular de la masa genera fuerzas centrífugas que son transmitidas a los rodamientos, generando su desgaste y consecuentemente en la reducción de su vida útil.
El desbalanceo normalmente es causado por acumulación de suciedad en los elementos giratorios, ausencia de contrapesos para el balanceo del eje, masa irregular en el bobinado del motor o incluso por variaciones en su fabricación.
También podemos clasificar el desbalanceo en tres tipos: estático, conjugado o dinámico. En el desbalanceo estático, la línea de rotación del eje y la línea de rotación del motor son paralelas, aunque no coinciden.
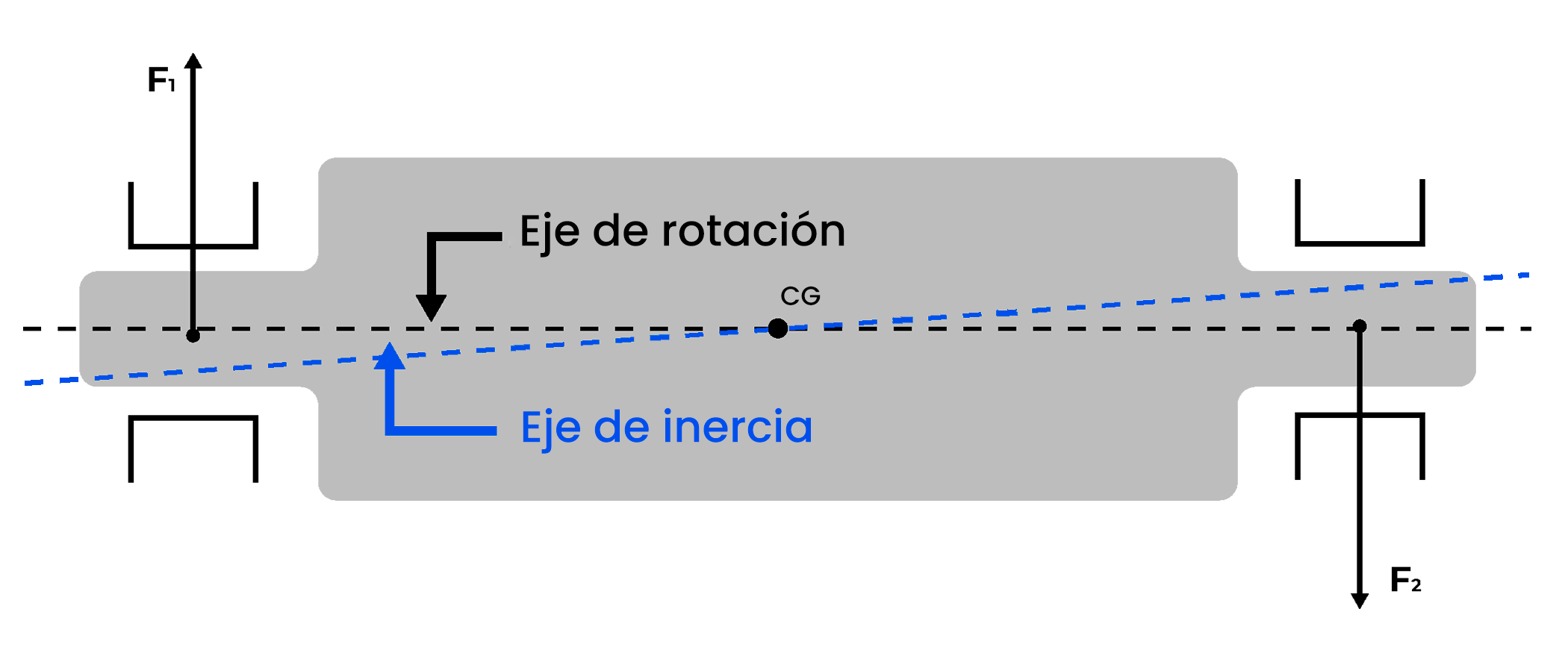
En el desbalanceo conjugado, los ejes no están paralelos, aunque existe una intercepción en el centro de gravedad (CG) del rotor.
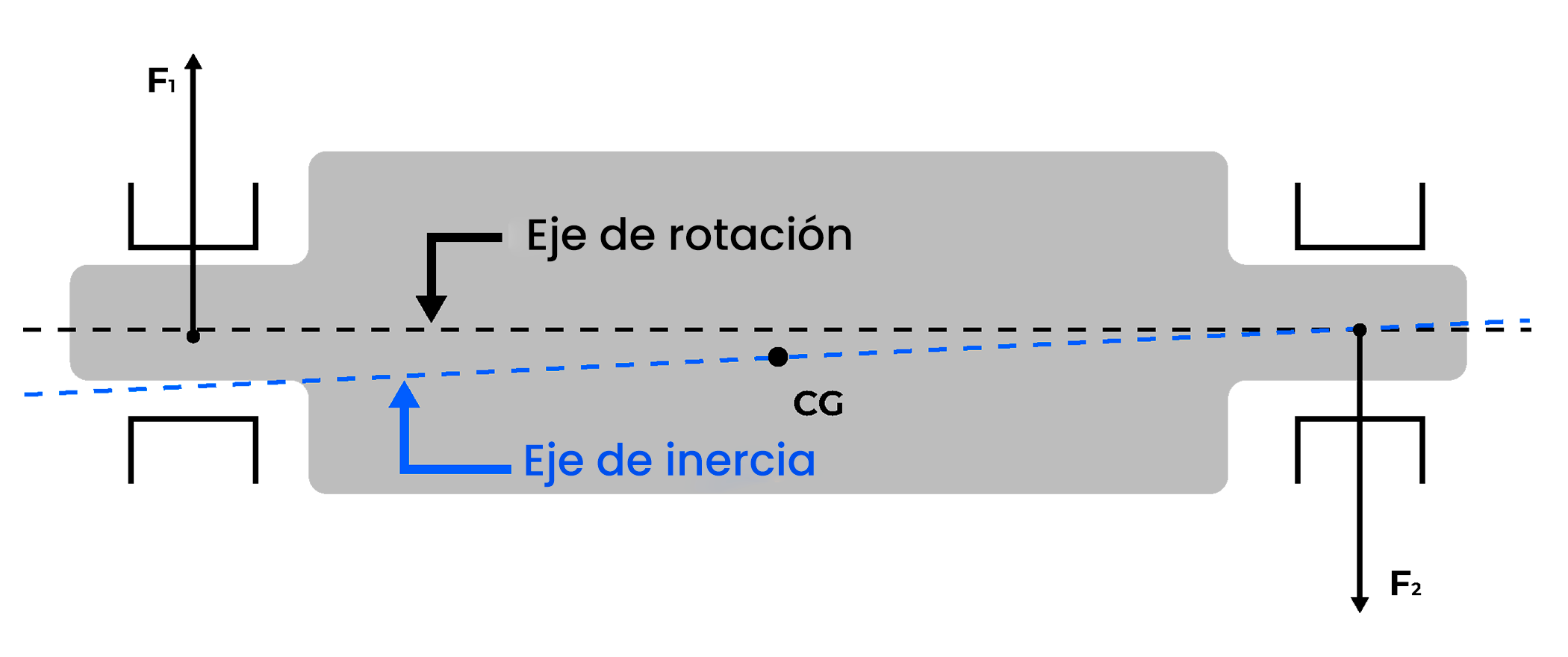
Finalmente, en el desbalanceo dinámico se identifican tanto el desbalanceo estático como el conjugado, donde el eje de rotación y el eje principal de la máquina no son paralelos y tampoco se interceptan.
La principal pérdida que el desbalanceo en un eje ocasiona, es el desgaste prematuro en los componentes de transmisión mecánica, que consecuentemente resultan en la falla prematura del equipo. El análisis espectral del patrón de vibración es una de las herramientas que ayudan a detectar si una máquina presenta problemas de desbalanceo, evitando así, costos adicionales en mantenimiento correctivo.
Implementa Mantenimiento Predictivo en tu Industria
6.Holgura en el eje
Se está en presencia de una holgura cuando existe un desgaste excesivo en las partes de un equipo. Puede ocurrir en elementos móviles que giran entre sí, o en elementos fijos. Según el Manual de diagnóstico de vibraciones de la oficina técnica de Charlotte (Vibration Diagnostic for Technical Associates of Charlotte), las holguras se clasifican en tres tipos: A, B y C.
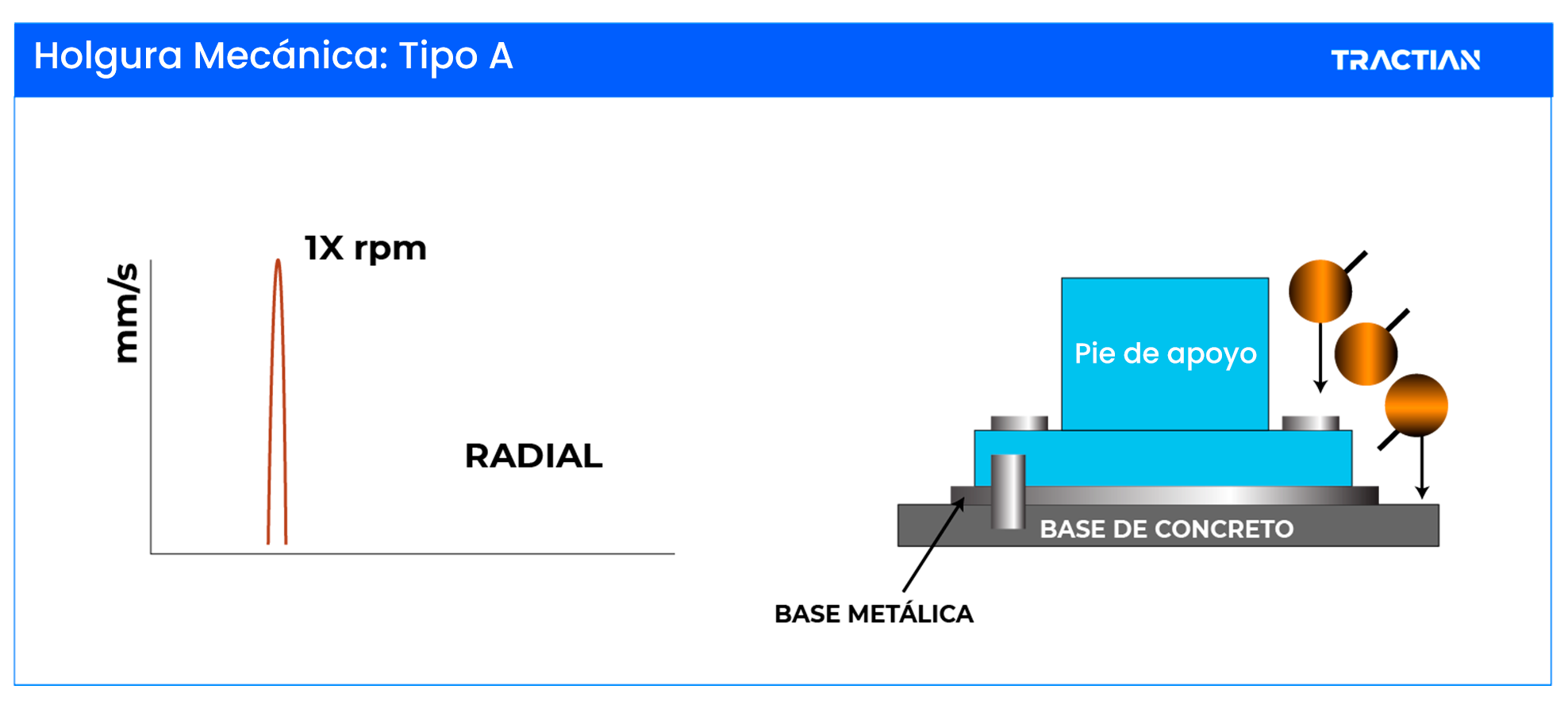
La holgura tipo A o estructural, es causada por la fragilidad en los pies, base o fundación de la máquina, y ocurre generalmente por deformaciones en la carcasa o base del equipo, mal diseño o deterioro de la fundación, o por la holgura en los tornillos que mantienen fijo el motor a su base. Esta se manifiesta en el espectro de vibración a través de una onda de un pulso por rotación:
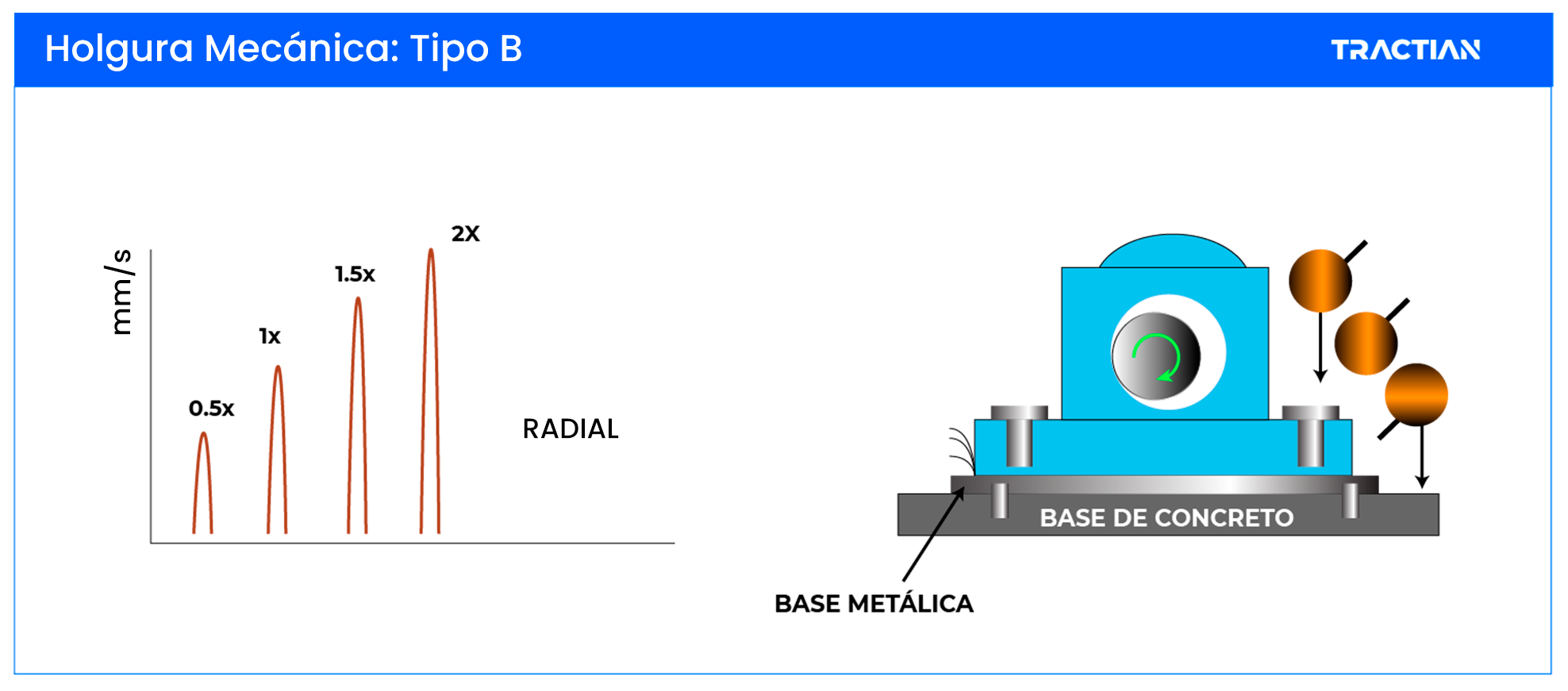
La holgura mecánica tipo B tiene como principal característica la presencia de tornillos de fijación sueltos en la base de apoyo, grietas en el pedestal del rodamiento y/o en el bastidor del patín. En el espectro, aparece como una onda temporal de dos pulsos por rotación.
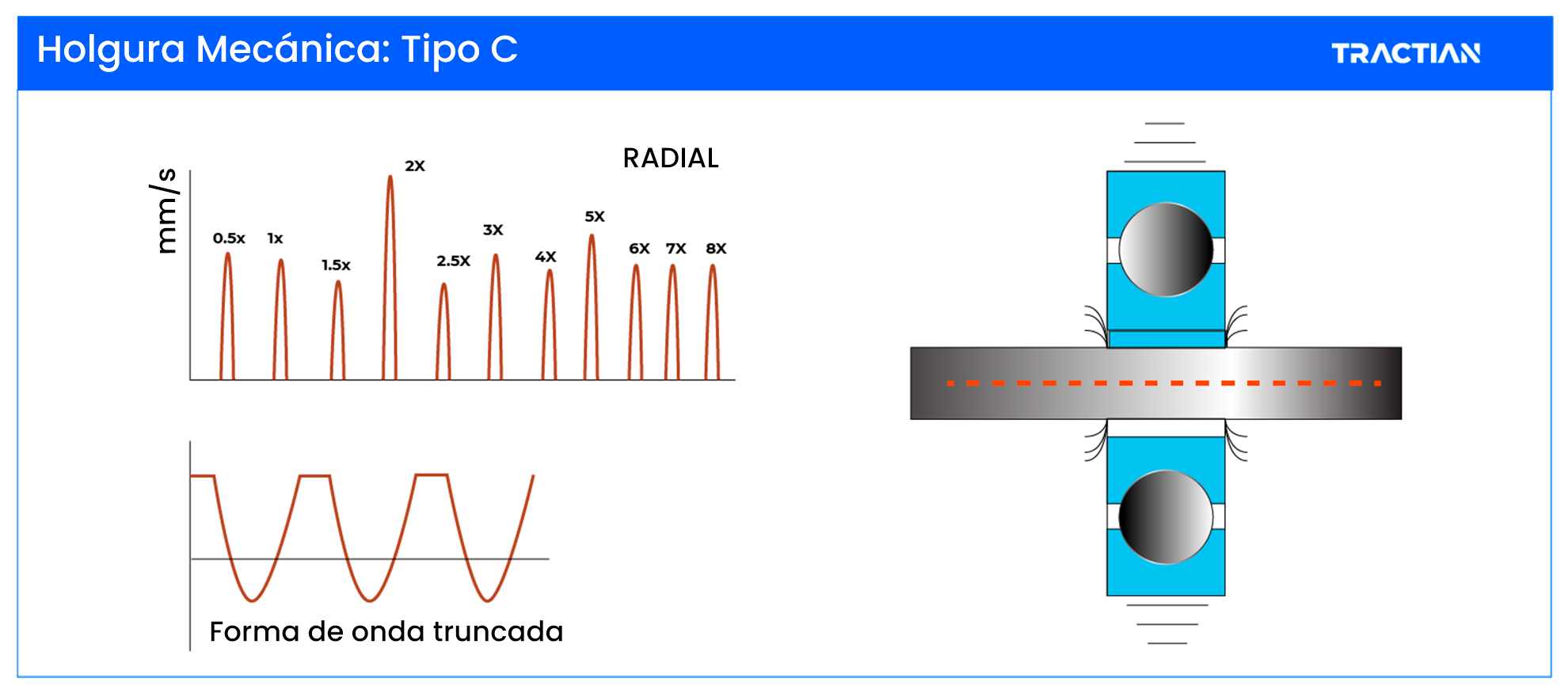
Por último, la holgura tipo C se manifiesta por el ajuste incorrecto entre las partes que componen las fuerzas dinámicas del rotor, como por ejemplo: el juego excesivo entre el rodamiento y el manguito, el rotor suelto en un determinado eje o un buje suelto en la tapa. Su aparición el espectro se manifiesta por un ruido elevado y varios armónicos que representan las respuestas no lineales de los elementos sueltos.
Diferentes de las ondas A y B, las revoluciones de las ondas temporales de la holgura tipo C presentan un patrón no repetitivo.
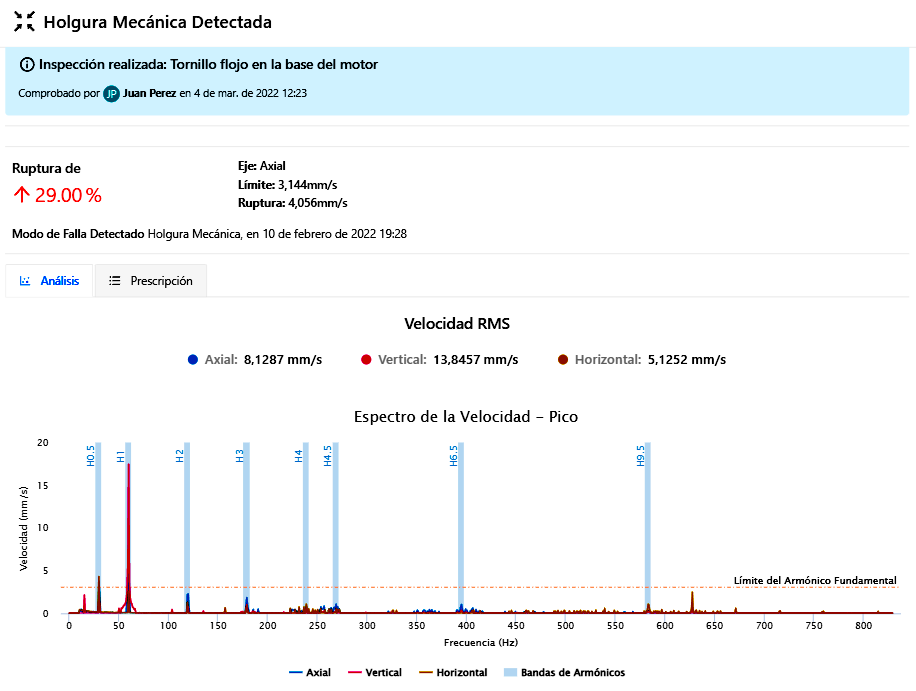
Como en las demás fuentes de vibraciones, la identificación de una holgura es importante para que el problema sea resuelto antes de que el desgaste de los componentes rotativos resulte en una falla mecánica. Así como en los casos de desbalanceo, el análisis de vibración es una alternativa para prevenir este tipo de fallas en el futuro.
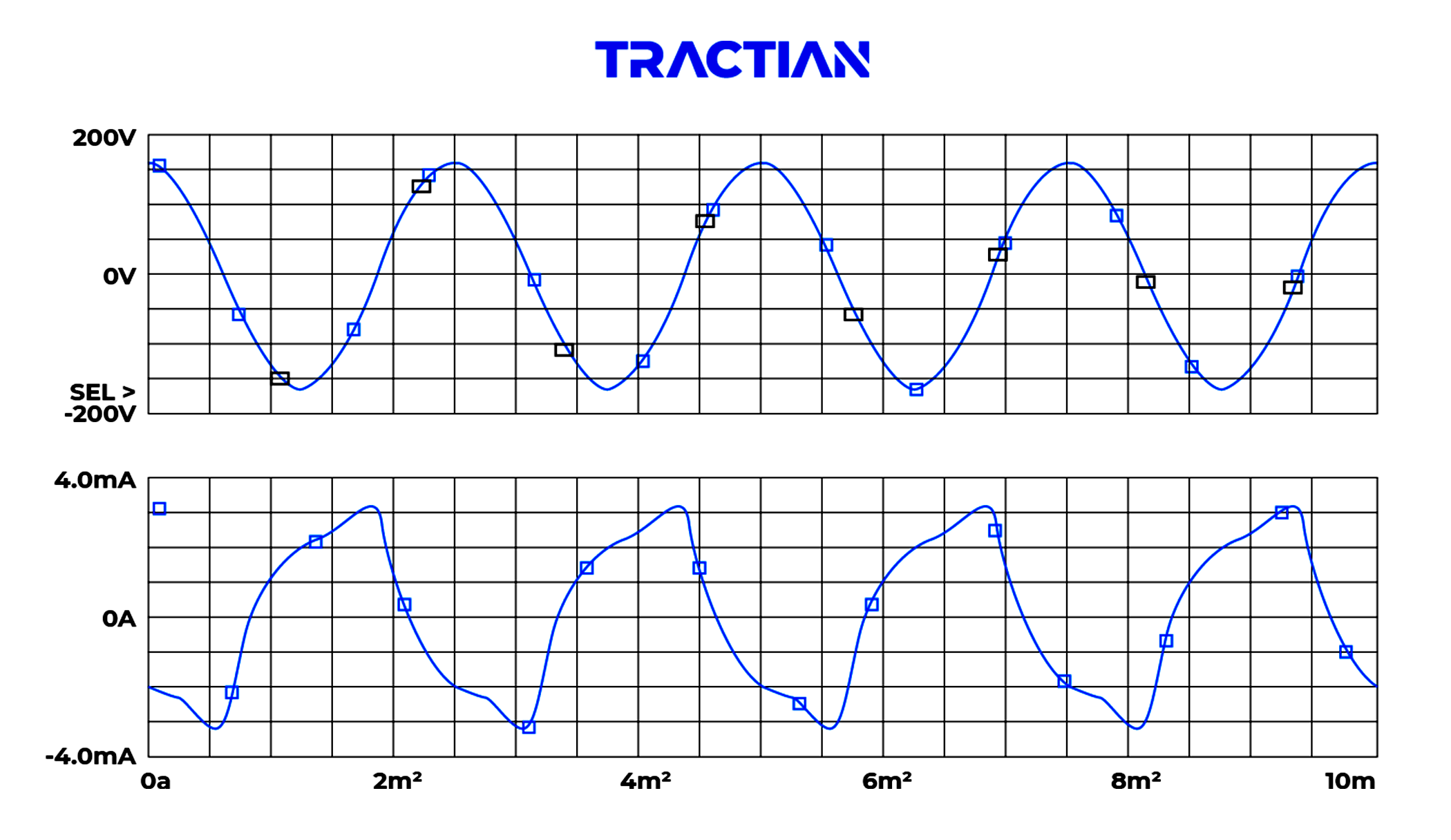
En la gráfica mostrada abajo se presenta el diagnóstico de una holgura mecánica detectada por la plataforma Tractian. En este caso, el gestor de mantenimiento fue notificado sobre la falla, pudiendo intervenir con anticipación y resolviendo el problema de forma asertiva.
7. Picos de tensión
Son señales de tensión transitoria que ocurren cuando un circuito o carga es accionada, y se trata básicamente de un problema en la calidad de la corriente eléctrica suministrada al motor.
Como los picos de tensión están asociados a grandes picos de interferencia electromagnética, pueden causar daños a los equipos conectados en el circuito, causando corrosión o rotura del material aislante en los devanados del motor. Todo eso ocurre debido a las variaciones de la amplitud y frecuencia de estos picos. Una de las consecuencias de problemas en el aislamiento en los devanados del motor es la interrupción de su operación, lo que puede causar una parada no planeada en la línea de producción.
Las causas de los picos de tensión pueden tener varios orígenes – dentro o fuera de la planta -, como cargas adyacentes al encender y apagar el equipo, factor de corrección de potencia de los bancos capacitores, entre otros. Como son problemas poco comunes, muchas veces es complicado determinar el origen del problema.
8. Distorsión de las armónicas
Las armónicas son los componentes de alta frecuencia de una señal eléctrica. Básicamente, son cualquier fuente adicional indeseada de alta frecuencia que entregan energía a los devanados del motor. Aunque esta energía adicional no se utiliza para hacer girar el eje del motor, circula por el embobinado, lo que en última instancia contribuye a las pérdidas de energía internas en forma de generación de calor.
Estas pérdidas, a lo largo del tiempo, ocasionan el deterioro de la capacidad del aislamiento de los devanados. En consecuencia, se pueden observar problemas como el aumento de la temperatura de operación, pérdida gradual de la eficiencia del motor y costos adicionales relacionados con el mantenimiento correctivo.
Cualquier sistema que suministre cargas electrónicas está sujeto a la distorsión armónica. Sin embargo, hay que investigar el origen de estas distorsiones para analizar si estos fenómenos se salen de lo normal y así, prevenir daños eléctricos en el equipo.
Así, un sensor de corriente y tensión – como el Energy Trac Tractian – podría ser utilizado para monitorear este tipo de fallas. Con este instrumento es posible hacer mediciones y monitorear la tendencia y los niveles de corriente eléctrica y de la temperatura de los transformadores. Los resultados mostrarán si los índices están por encima o por debajo de los parámetros establecidos por la norma IEEE 519-1992.
9. Corriente sigma
Son las corrientes parásitas que circulan por un circuito eléctrico, generadas por la frecuencia de la señal, el nivel de tensión, las capacitancias y las inductancias asociadas a los conductores eléctricos. Al circular por los sistemas de protección de tierra, las corrientes sigma pueden provocar disparos inoportunos e incluso un exceso de calor en los devanados del motor.
Los sigma se encuentran en los cables del motor y representan la suma de la corriente de las tres fases en cualquier momento. Un escenario ideal establece que la suma de las corrientes es siempre igual a cero, es decir, la corriente de retorno desde la unidad debe ser igual a la corriente hacia la unidad.
Para evitar el problema, se recomienda utilizar conductores de buen tamaño y calidad. Evite también las soldaduras o las conexiones inadecuadas en el conductor.
10. Desequilibrio de fases
Los motores más utilizados en la industria son los de inducción de jaula de ardilla, asíncronos y alimentados por circuitos trifásicos. Para un buen funcionamiento, es importante que las tres fases que alimentan el estator estén equilibradas.
Lo que suele ocurrir en la mayoría de las fábricas es que gran parte de los sistemas de distribución trifásica suministran cargas monofásicas. Así, cuando se produce un desequilibrio en la distribución de la carga de la impedancia, el problema puede desencadenarse para las tres fases, generando un flujo de corriente excesivo que culmina en un aumento de la temperatura de funcionamiento.
Una vez que observamos fases desequilibradas, puede culminar en situaciones de parada, sobrecalentamiento y problemas en el aislamiento en los devanados del motor.
¿Cómo evitar las fallas más comunes en motores eléctricos?
Como se mencionó en los ejemplos anteriores, además de la rutinas de inspección regulares, otras medidas pueden ser implementadas para asegurar la operación eficiente de los equipos, sin que se produzcan paros repentinos y las posibles pérdidas que una interrupción de la producción puede causar a la industria.
La plataforma de monitoreo online de Tractian, fue desarrollada con el objetivo de proporcionar una herramienta útil para los ingenieros de mantenimiento con el fin de ayudarlos a identificar diferentes tipos de anomalías y generar diagnósticos capaces de prevenir fallas inesperadas en los motores eléctricos.
Conoce aquí todos los equipos que nuestro sensor consigue monitorear e implementar nuestra solución para llevar el mantenimiento de su fábrica a otro nivel. Póngase en contacto con un experto de Tractian.